| Похожие рефераты | Скачать .docx |
Курсовая работа: Безопасность транспортных средств
Курсовой проект
по предмету Безопасность транспортных средств
В данной работе необходимо произвести расчеты для определения различных показателей безопасности автотранспортного средства. Задание к выполнению курсового проекта определяется последними цифрами номера зачетной книжки.
Обгоняющий автомобиль ВАЗ-21099*
Обгоняемый автомобиль ЗИЛ-431410*
с параметрами:
длинна автомобиля ВАЗ-21099 - ![]() 4,205
4,205![]()
длинна автомобиля ЗИЛ-431410 - ![]()
![]()
коэффициент сцепления шин с дорогой - ![]() 0,55
0,55
коэффициент сопротивления качению -![]() 0,03
0,03
Продольный угол подъема дороги - ![]() 2О
2О
скорость обгоняемого автомобиля - 65 ![]()
ускорение при обгоне -![]() 0,9
0,9 ![]()
*Полная техническая характеристика автомобилей находится в приложении 1
Введение
Основными причинами роста числа дорожно-транспортных происшествий в нашей стране являются:
· рост автомобильного парка при неудовлетворительном состоянии имеющейся дорожной сети;
· отставание в строительстве современных автомагистралей и реконструкции эксплуатируемых;
· недостатки в организации дорожного движения;
· старение технических средств ОДД;
· недостаточный профессиональный уровень водителей;
· низкая дисциплина водителей и пешеходов;
· неудовлетворительное техническое состояние индивидуальных транспортных средств;
· неквалифицированное техническое обслуживание; несовершенство технического смотра АТС и другие.
Для повышения безопасности дорожного движения требуется решение многих проблем, в том числе подготовка квалифицированных инженеров по организации и безопасности дорожного движения. Это невозможно без приобретения студентами практических навыков по всем профилирующим дисциплинам, предусмотренным ГОС и учебным планом по специальности 240400 “Организация и безопасность движения”.
“Безопасность транспортных средств” является одной из профилирующих дисциплин для специальности. Она должна сформировать у студентов всестороннее представление о конструктивной безопасности АТС и влияние их эксплуатационных свойств на безопасность движения. В связи с этим в данной курсовой работе основное внимание уделено расчету характерных элементов конструктивной безопасности автотранспортных средств. Представленные к расчету задачи разработаны в соответствии с рабочей программой по дисциплине “Безопасность транспортных средств”.
Практические работы выполнялись в процессе изучения дисциплины БТС тем самым прививая навыков проведения расчетов элементов конструктивной безопасности АТ.
1. Компоновочные параметры автомобиля и их влияние на безопасность дорожного движения
1.1 Расчет ширины динамического коридора
Под динамическим коридором автотранспортного средства понимается ширина полосы дороги (проезжей части), необходимой для его безопасного движения с заданной скоростью.
На прямолинейном участке динамический коридор определяют по эмпирическим формулам следующего типа:
![]() (1)
(1)
где: ![]() - коэффициент, зависящий от квалификации водителя и его психофизиологического состояния,
- коэффициент, зависящий от квалификации водителя и его психофизиологического состояния, ![]() 0,015 - 0,054;
0,015 - 0,054;
![]() - габаритная ширина автомобиля.
- габаритная ширина автомобиля. ![]() ;
;
![]() - скорость движения автомобиля,
- скорость движения автомобиля, ![]() .
.
Значения ![]() берем по заданию. В нашем случае ширина автомобиля ВАЗ-21099 равна 1,65
берем по заданию. В нашем случае ширина автомобиля ВАЗ-21099 равна 1,65 ![]() . Скорость движения задается в интервале от 10 до 100 км/ч.
. Скорость движения задается в интервале от 10 до 100 км/ч.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Расчетные значения ![]() ,
, ![]() , полученные по формуле (1), указаны в таблице 1, по ним построен график зависимости динамического коридора от скорости автомобиля -
, полученные по формуле (1), указаны в таблице 1, по ним построен график зависимости динамического коридора от скорости автомобиля - ![]() .
.
Таблица 1.Значения ![]() в зависимости от
в зависимости от ![]()
| 10 | 20 | 40 | 60 | 80 | 90 | 100 | |
| 2,77 | 5,55 | 11,11 | 16,6 | 22,22 | 25 | 27,77 | |
| 2,05 | 2,14 | 2,33 | 2,52 | 2,72 | 2,81 | 2,91 |
На криволинейном участке дороги ширину проезжей части (динамический коридор) можно вычислить на основе данной схемы движения одиночного автомобиля на криволинейном участке
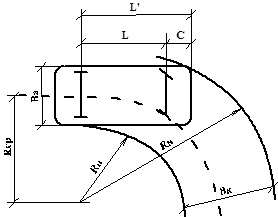
Из этой схемы очевидно, что
![]()
![]() (2)
(2)
где: ![]() и
и ![]()
![]() , - наружный и внутренний габаритные радиусы поворота автомобиля;
, - наружный и внутренний габаритные радиусы поворота автомобиля;
![]() - габаритная ширина проезжей части дороги в статике, т.е. без учета скорости и поправочного коэффициента (запаса), принимаемого в расчетах равным 0,3
- габаритная ширина проезжей части дороги в статике, т.е. без учета скорости и поправочного коэффициента (запаса), принимаемого в расчетах равным 0,3 ![]() .
.
Как известно, средний радиус поворота (траектория движения точки пересечения оси заднего моста и продольной оси автомобиля) определяется по формуле
![]()
 (3)
(3)
где: ![]() - база автомобиля,
- база автомобиля, ![]() . В нашем случае для автомобиля ВАЗ-21099 она составляет 2,46
. В нашем случае для автомобиля ВАЗ-21099 она составляет 2,46![]() ;
;
![]() - угол поворота управляемых колес, град.
- угол поворота управляемых колес, град.
Задаваясь величиной угла ![]() , по формуле (3) определяем
, по формуле (3) определяем ![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()

![]()
![]()
Полученные значения заносим в таблицу 2.
Из схемы видно, что
![]()
![]() ;
;
![]() (4)
(4)
где: ![]() - передний свес автомобиля.
- передний свес автомобиля.
В нашем случае для автомобиля ВАЗ-21099 он составляет 0,785![]() .
.
Расчетные значения ![]()
![]() ,
, ![]() и
и ![]() , вычисляем по формулам (2-4)
, вычисляем по формулам (2-4)
Для угла поворота управляемых колес 2о:
![]()

![]()
![]()
Для угла поворота управляемых колес 4о:
![]()
![]()
![]()
![]()
Для угла поворота управляемых колес 8о:
![]()
![]()
![]()
Для угла поворота управляемых колес 12о:
![]()
![]()
![]()
![]()
Для угла поворота управляемых колес 16о:
![]()
![]()
![]()
![]()
Для угла поворота управляемых колес 20о:
![]()
![]()
![]()
Для угла поворота управляемых колес 24о:
![]()
![]()
![]()
Полученные данные заносим в таблицу 2
Для расчета динамического коридора ![]() на криволинейном участке, в зависимости от скорости и угла поворота управляемых колес, значения
на криволинейном участке, в зависимости от скорости и угла поворота управляемых колес, значения ![]() задаются с учетом показателей устойчивости АТС, а предельное значение
задаются с учетом показателей устойчивости АТС, а предельное значение ![]() задается по техническим характеристикам автомобиля.
задается по техническим характеристикам автомобиля.
Значения ![]() , рассчитываются по формуле (1), подставляя вместо
, рассчитываются по формуле (1), подставляя вместо ![]() значения
значения ![]() .
.
![]()
Для скорости движения 10![]() :
:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Для скорости движения 20![]() :
:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Для скорости движения 40![]() :
:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Полученные данные заносим в таблицу 2 и строим графики зависимости динамического коридора от угла поворота управляемых колес при разных значениях скорости автомобиля
Таблица 2. Расчетные значения параметров для определения ![]() , на криволинейном участке дороги.
, на криволинейном участке дороги.
| Угол поворота управляемых колес, о | 20 | 40 | 80 | 120 | 160 | 200 | 24 |
| 70,445 | 35,180 | 17,504 | 11.573 | 8.579 | 6.759 | 5.525 | |
| 69.62 | 34.36 | 16.68 | 10.77 | 7.75 | 5.93 | 4.7 | |
| 71.29 | 36.04 | 18.41 | 12.53 | 9.55 | 7.76 | 6.57 | |
| 1.67 | 1.69 | 1.73 | 1.76 | 1.80 | 1.83 | 1.87 | |
| 2.07 | 2.09 | 2.13 | 2.16 | 2.19 | 2.23 | 2.27 | |
| 2.16 | 2.18 | 2.22 | 2.25 | 2.29 | 2.32 | 2.36 | |
| 2.35 | 2.37 | 2.41 | 2.44 | 2.48 | 2.51 | 2.55 |
Вывод
: из графика зависимости ширины динамического коридора от скорости автомобиля видно, что существует практически прямая зависимость этих показателей. Чем выше скорость, тем больше расчетная ширина динамического коридора, например, на скорости 100 ![]() , ширина коридора 2,9
, ширина коридора 2,9![]() . Следовательно, для безопасного движения на высоких скоростях необходимо обеспечить достаточную ширину полос для движения.
. Следовательно, для безопасного движения на высоких скоростях необходимо обеспечить достаточную ширину полос для движения.
Из графика зависимости ширины динамического коридора от угла поворота управляемых колес автомобиля четко видно, что по мере увеличения угла поворота управляемых колес ширина динамического коридора так же увеличивается, при скорости 40км/час начиная со значения 2,35![]() до 2,55
до 2,55![]() .
.
1.2 Расчет дистанции безопасности при движении автомобиля
Безопасную дистанцию между автомобилями![]() определяют по различным эмпирическим формулам, т.к. на нее влияют очень много факторов:
определяют по различным эмпирическим формулам, т.к. на нее влияют очень много факторов:
· скорость и техническое состояние автомобиля;
· дорожные условия;
· среда;
· вид транспорта;
· квалификация, степень утомленности и культура вождения водителя и др.
Динамический габарит автомобиля ![]() включает его длину
включает его длину ![]() и дистанцию безопасности между движущимися транспортными средствами, т.е.
и дистанцию безопасности между движущимися транспортными средствами, т.е.
![]()
Допустим, что дистанция![]() должна быть равна полному остановочному пути
должна быть равна полному остановочному пути![]() ведомого (впереди движущегося) автомобиля. Тогда
ведомого (впереди движущегося) автомобиля. Тогда
 (5)
(5)
где: ![]() - время реакции водителя;
- время реакции водителя;
![]() - время срабатывания тормозных механизмов;
- время срабатывания тормозных механизмов;
![]() - время наращивания тормозных сил до максимальных значений при экстренном торможении;
- время наращивания тормозных сил до максимальных значений при экстренном торможении;
![]() -установившееся замедление.
-установившееся замедление.
По разным рекомендациям, зазор между медленно движущимися автомобилями ![]() должен составить в пределах 2 - 4
должен составить в пределах 2 - 4![]() . Для наших расчетов берем среднее значение 3
. Для наших расчетов берем среднее значение 3![]() . Расчет остановочного и тормозного пути АТС рассмотрены в разделе 3.1.
. Расчет остановочного и тормозного пути АТС рассмотрены в разделе 3.1.
Для более точного расчета ![]() в формулу (5) нужно ввести поправку на то, что при включении сигнала торможения ведомого автомобиля следующий за ним водитель тоже обязан замедлить скорость своего автомобиля. В случае экстренного торможения или при необходимости существенно снизить скорость движения дистанцию безопасности нужно определить по следующей формуле:
в формулу (5) нужно ввести поправку на то, что при включении сигнала торможения ведомого автомобиля следующий за ним водитель тоже обязан замедлить скорость своего автомобиля. В случае экстренного торможения или при необходимости существенно снизить скорость движения дистанцию безопасности нужно определить по следующей формуле:
 (6)
(6)
где:![]() и
и![]() - замедление сзади движущегося и ведомого автомобилей;
- замедление сзади движущегося и ведомого автомобилей;
![]() - их средняя скорость,км/час.
- их средняя скорость,км/час.
![]()
где: ![]() - время реакции водителя, в зависимости от квалификация и степень утомленности водителя берем в диапазоне 0,7 - 0,8 секунды;
- время реакции водителя, в зависимости от квалификация и степень утомленности водителя берем в диапазоне 0,7 - 0,8 секунды;
![]() - время срабатывания механизма тормозного привода, для гидравлического привода берется в диапазоне 0,2 – 0,4 секунды;
- время срабатывания механизма тормозного привода, для гидравлического привода берется в диапазоне 0,2 – 0,4 секунды;
![]() - время нарастания давления в тормозных цилиндрах, берем в диапазоне 0,1 – 0,3 секунды.
- время нарастания давления в тормозных цилиндрах, берем в диапазоне 0,1 – 0,3 секунды.
В нашем случае берем усредненные значения времени
![]()
где: ![]() - коэффициент сцепления шин с дорогой. В нашем случае он равен 0,55
- коэффициент сцепления шин с дорогой. В нашем случае он равен 0,55
![]() - коэффициент, учитывающий сопротивление дороги
- коэффициент, учитывающий сопротивление дороги
![]()
где: ![]() - коэффициент сопротивления качению. В нашем случае берем значение 0,03
- коэффициент сопротивления качению. В нашем случае берем значение 0,03
![]() - уклон дороги.
- уклон дороги.
![]()
где: ![]() - продольный угол подъема дороги. В нашем случае составляет 20
- продольный угол подъема дороги. В нашем случае составляет 20
![]()
![]()
![]() - коэффициент обтекаемости, для легковых автомобилей берется в диапазоне 0,2 -0,3. В нашем случае , для автомобиля ВАЗ-21099 возьмем среднее значение 0,25. Для грузовых автомобилей берется в диапазоне 0,6 -0,7. В нашем случае , для автомобиля ЗИЛ-431410 возьмем среднее значение 0,65
- коэффициент обтекаемости, для легковых автомобилей берется в диапазоне 0,2 -0,3. В нашем случае , для автомобиля ВАЗ-21099 возьмем среднее значение 0,25. Для грузовых автомобилей берется в диапазоне 0,6 -0,7. В нашем случае , для автомобиля ЗИЛ-431410 возьмем среднее значение 0,65
![]() - лобовая площадь автомобиля
- лобовая площадь автомобиля ![]() , для легковых автомобилей рассчитывается по формуле:
, для легковых автомобилей рассчитывается по формуле:
![]()
где: ![]() - высота автомобиля,
- высота автомобиля, ![]() . Для автомобиля ВАЗ-21099 составляет 1,402
. Для автомобиля ВАЗ-21099 составляет 1,402![]() .
.
![]() - колея передних колес автомобиля,
- колея передних колес автомобиля, ![]() . Для автомобиля ВАЗ-21099 составляет 1,4
. Для автомобиля ВАЗ-21099 составляет 1,4![]() .
.
![]()
Для грузовых лобовая площадь автомобиля рассчитывается по формуле:
![]()
![]() для автомобиля ЗИЛ-431410 составляет 2,4
для автомобиля ЗИЛ-431410 составляет 2,4![]() .
.
![]() для автомобиля ЗИЛ-431410 составляет 1,8
для автомобиля ЗИЛ-431410 составляет 1,8![]() .
.
![]()
![]() - вес автомобиля,
- вес автомобиля, ![]() .
.
Для автомобиля Ваз-21099 составляет 13400![]() Для автомобиля ЗИЛ-431410 составляет 41750
Для автомобиля ЗИЛ-431410 составляет 41750![]() .
.
![]() - коэффициент учета вращающихся масс при торможении, рассчитываем по формуле:
- коэффициент учета вращающихся масс при торможении, рассчитываем по формуле:
![]()
Автомобиль ВАЗ-21099:
Для первой передачи:
![]()
Для второй передачи:
![]()
Для третьей передачи:
![]()
Для четвертой передачи:
![]()
Для пятой передачи:
![]()
Автомобиль ЗИЛ-431410:
Для первой передачи:
![]()
Для второй передачи:
![]()
Для третьей передачи:
![]()
Для четвертой передачи:
![]()
Для пятой передачи:
![]()
Значения замедления для 40![]() :
:


Значения замедления для 50![]() :
:


автомобиль безопасность дорожный движение
Значения замедления для 60![]() :
:


Значения замедления для 70![]() :
:


Значения замедления для 80![]() :
:


Значения замедления для 90![]() :
:








Вычисленные данные заносим в таблицу 3.
Таблица 3 .Расчет дистанции безопасности
| 40 | 50 | 60 | 70 | 80 | 90 | |
| 11,11 | 13,88 | 16,66 | 19,44 | 22,22 | 25 | |
| 0,5219 | 0,561 | 0,580 | 0,584 | 0,588 | 0,593 | |
| 0,545 | 0,581 | 0,587 | 0,593 | 0,600 | 0,608 | |
| 22,27 | 26,47 | 30,44 | 32,50 | 39,50 | 47,63 |
Вывод
: график зависимости дистанции безопасности от скорости автомобилей показывает, что чем выше скорость движения, тем большую дистанцию необходимо держать между идущими друг за другом автомобилями. Например, при движении со скоростью 90 ![]() , дистанция между автомобилями должна составлять 47,63м этом случае при резком торможении впереди идущего автомобиля, следующий за ним автомобиль успеет снизить скорость и остановиться, не создавая опасность столкновения.
, дистанция между автомобилями должна составлять 47,63м этом случае при резком торможении впереди идущего автомобиля, следующий за ним автомобиль успеет снизить скорость и остановиться, не создавая опасность столкновения.
2. Определение времени и пути завершенного обгона
2.1 Расчет времени и пути обгона при постоянной скорости автомобилей
Обгон представляет собой опасный и ответственный маневр автомобиля в транспортном потоке, так как связан или с выездом на встречную полосу, или с изменением положения в потоке транспортных средств. Обгон требует свободного пространства перед обгоняющим автомобилем и совершается, как правило, при относительно высокой скорости. Это обусловливает большой риск совершения ДТП при обгоне.
В зависимости от условий движения (плотности транспортных потоков, скорости и др.) обгон может совершаться либо с постоянной скоростью, либо с разгоном. Обгоны с постоянной скоростью возможны на дорогах с шириной проезжей части более 7 - 8 ![]() и интенсивностью движения в обоих направлениях менее 40 - 60
и интенсивностью движения в обоих направлениях менее 40 - 60 ![]() . Схема обгона транспортных средств на двух полосной дороге представлена ниже
. Схема обгона транспортных средств на двух полосной дороге представлена ниже

Схема обгона с выездом на встречную полосу
Из данной схемы видно, что минимальное расстояние обгона, необходимое для завершения его при постоянных скоростях движения обгоняемого 2, обгоняющего 1 и встречного 3 автомобилей, можно определить как сумму
![]() (7)
(7)
где: ![]() и
и ![]() - дистанции безопасности между автомобилями (соответственно индексу);
- дистанции безопасности между автомобилями (соответственно индексу);
![]() и
и ![]() - их габаритная длина, 4,205 и 6,675
- их габаритная длина, 4,205 и 6,675![]() соответственно.
соответственно.
Поскольку
![]() (8)
(8)
![]() (9)
(9)
то решая совместно формулы (7 и 8), получаем
 (10)
(10)
 (11)
(11)
Минимальное расстояние, которое должно быть свободным перед обгоняющим автомобилем в начале обгона (расстояние до встречного автомобиля), нужно определить с учетом ![]() , определяемого по формулам (8 - 11) и скорости автомобиля 3, двигающегося на встречной полосе движения:
, определяемого по формулам (8 - 11) и скорости автомобиля 3, двигающегося на встречной полосе движения:
 (12)
(12)
Для расчетов лучше выбрать ![]() , равной допустимой скорости движения на данном участке дороги согласно ПДД. В нашем случае она составляет 90
, равной допустимой скорости движения на данном участке дороги согласно ПДД. В нашем случае она составляет 90![]() . Скорость обгоняющего автомобиля
. Скорость обгоняющего автомобиля ![]() нужно задать по техническим характеристикам, т.е. примерно 0,8-0,9 от
нужно задать по техническим характеристикам, т.е. примерно 0,8-0,9 от ![]() . В нашем случае она составляет 140
. В нашем случае она составляет 140![]() .
.
По формулам 8 - 12 определяем ![]() ,
, ![]() ,
, ![]() для разных значений
для разных значений ![]() ; и при постоянных
; и при постоянных ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Для расчетов нам понадобятся некоторые значения ![]() для различных скоростей:
для различных скоростей:
![]()





Для ![]()
![]()
![]()
![]()
Для ![]()

![]()
![]()
Для ![]()
![]()
![]()
![]()
Для ![]()
![]()
![]()
![]()
Для ![]()

![]()
![]()
Расчетные данные вносим в таблицу 4 и строят графики зависимости ![]() и
и ![]() от скорости обгоняемого автомобиля
от скорости обгоняемого автомобиля ![]() , которую можно задать в интервале 40 - 80
, которую можно задать в интервале 40 - 80![]() .
.
Таблица 4. Расчет времени и пути обгона при постоянной скорости обгоняющего автомобиля (![]() ).
).
| 40 | 50 | 60 | 70 | 80 | |
| 11,11 | 13,88 | 16,66 | 19,44 | 22,22 | |
| 62,97 | 80,87 | 109,3 | 132,8 | 170,57 | |
| 1,62 | 2,08 | 2,81 | 3,39 | 4,39 |
Вывод
: из графика зависимости пути и времени обгона от скорости обгоняемого автомобиля видна понятная закономерность, что чем выше начальная скорость обгоняемого автомобиля, тем больший путь пройдет обгоняющий автомобиль двигающийся с постоянной скоростью. И тем больше времени ему понадобиться на осуществление этого маневра. Так например чтобы обогнать автомобиль двигающийся со скоростью 80![]() , обгоняющий автомобиль пройдет расстояние 170,57 метра и он потратит
4,39сек.
, обгоняющий автомобиль пройдет расстояние 170,57 метра и он потратит
4,39сек.
2.2 Определение времени и пути обгона с разгоном обгоняющего автомобиля
Если интенсивность движения в обоих направлениях на двухполосной дороге превышает 150-160 ![]() (фаза связанного или частично связанного движения), то автомобили движутся сплошным потоком, а скорости обгоняющего и обгоняемого автомобилей выравниваются. Только при появлении свободного пространства начинают обгон, сочетая его с разгоном. Разгон АТС при обгоне должен выполняться с максимальной интенсивностью и прекращается плавно после его завершения. Реализация такого режима возможна только в том случае, когда имеется необходимый интервал между обгоняемым АТС и автомобилем, двигающимся впереди него. В противном случае водитель обгоняемого АТС после завершения обгона обгоняющим автомобилем будет вынужден экстренно затормозить.
(фаза связанного или частично связанного движения), то автомобили движутся сплошным потоком, а скорости обгоняющего и обгоняемого автомобилей выравниваются. Только при появлении свободного пространства начинают обгон, сочетая его с разгоном. Разгон АТС при обгоне должен выполняться с максимальной интенсивностью и прекращается плавно после его завершения. Реализация такого режима возможна только в том случае, когда имеется необходимый интервал между обгоняемым АТС и автомобилем, двигающимся впереди него. В противном случае водитель обгоняемого АТС после завершения обгона обгоняющим автомобилем будет вынужден экстренно затормозить.
Значения времени обгона ![]() , пути обгона
, пути обгона ![]() и скорости обгоняющего АТС в момент завершения обгона
и скорости обгоняющего АТС в момент завершения обгона ![]() в зависимости от скорости обгоняемого автомобиля определяют предельные условия, при которых обгон может быть завершен. Для расчета времени и пути обгона с разгоном применяют графо-аналитические и аналитические методы с учетом того, что
в зависимости от скорости обгоняемого автомобиля определяют предельные условия, при которых обгон может быть завершен. Для расчета времени и пути обгона с разгоном применяют графо-аналитические и аналитические методы с учетом того, что
![]()
Для упрощения расчетов допускают, что обгоняющий автомобиль движется с постоянным ускорением. Ускорение при разгоне обычно принимают примерно 0,7-0,8 от ![]() .
.
При равноускоренном движении обгоняющего автомобиля с начальной скоростью ![]() :
:
 (13)
(13)
![]() (14)
(14)
Из формул (13 и 14) следует, что чем выше приемистость автомобиля, тем меньше величины ![]() и
и ![]() . Поэтому время и путь обгона зависят от запаса тяговой силы
. Поэтому время и путь обгона зависят от запаса тяговой силы ![]() . Запас тяги зависит от технических характеристик и скорости движения АТС. Задавая различные значения
. Запас тяги зависит от технических характеристик и скорости движения АТС. Задавая различные значения ![]() (при
(при ![]() ), определяем расчетным методом значения
), определяем расчетным методом значения ![]() и
и ![]() по формулам (13 и 14)
по формулам (13 и 14)
Для расчетного значения ![]()
![]()
![]()
Для расчетного значения ![]()
![]()
![]()
Для расчетного значения ![]()
![]()

Для расчетного значения ![]()
![]()
![]()
Для расчетного значения ![]()
![]()
![]()
Полученные значения вносим в таблицу 5 и строим график зависимости от ![]() от
от ![]() .
.
Таблица 5.Расчетные значения ![]() и
и ![]() в зависимости от ускорения.
в зависимости от ускорения.
| 0,2 | 0,4 | 0,8 | 1,2 | 1,6 | |
| 0,15 | 0,3 | 0,6 | 0,9 | 1,2 | |
| 523.8 | 413.9 | 342 | 301.1 | 287.7 | |
| 24.61 | 18.62 | 14.4 | 12.1 | 11.04 |
Вывод
: график зависимости времени и пути обгона от ускорения обгоняющего автомобиля при постоянной скорости обгоняемого автомобиля показывает, что с увеличением ускорения путь необходимый для безлопастного обгона уменьшается. Так автомобилю ускорением 0,2 ![]() понадобиться 523.8 метра пути, а с ускорением 1.2
понадобиться 523.8 метра пути, а с ускорением 1.2 ![]() , всего 301.1 метра.
, всего 301.1 метра.
3.1 Расчет показателей тормозных свойств автомобиля
Показателями тормозной динамичности АТС являются: замедление ![]() время
время![]() и путь
и путь![]() торможения при заданной скорости; тормозная сила, ее интенсивность нарастания и распределения по колесам и осям автомобиля. Из уравнения движения автомобиля при торможении замедление можно определить расчетным методом по следующей формуле:
торможения при заданной скорости; тормозная сила, ее интенсивность нарастания и распределения по колесам и осям автомобиля. Из уравнения движения автомобиля при торможении замедление можно определить расчетным методом по следующей формуле:
 (15)
(15)
где: ![]() - суммарная тормозная сила на колесах, равная силе сцепления шин с дорогой;
- суммарная тормозная сила на колесах, равная силе сцепления шин с дорогой;
![]() и
и ![]() - сила сопротивления дороги и воздуха соответственно;
- сила сопротивления дороги и воздуха соответственно;
![]() - сила трения двигателя и трансмиссии;
- сила трения двигателя и трансмиссии;
![]() - коэффициент учета вращающихся масс при торможении;
- коэффициент учета вращающихся масс при торможении;
![]() - вес автомобиля (
- вес автомобиля (![]() );
);
![]() - ускорение свободного падения,
- ускорение свободного падения, ![]() .
.
При экстренном торможении, когда тормозные силы на всех колесах
достигли значения сил сцепления, а также пренебрегая силами ![]() ,
, ![]() и
и ![]() из уравнения (15), имеем
из уравнения (15), имеем
 (16)
(16)
где: ![]() - коэффициент сцепления шины с дорогой;
- коэффициент сцепления шины с дорогой;
![]() - коэффициент, учитывающий сопротивление дороги,
- коэффициент, учитывающий сопротивление дороги, ![]()
![]() - сопротивление качению;
- сопротивление качению; ![]() - уклон дороги (
- уклон дороги (![]() )
)
Если учитывать сопротивление воздуха, то
 (17)
(17)
где:![]() - коэффициент обтекаемости;
- коэффициент обтекаемости;
![]() - лобовая площадь автомобиля,
- лобовая площадь автомобиля, ![]()
![]() - его скорость,
- его скорость, ![]() (снижается от
(снижается от ![]() до нуля).
до нуля).
Коэффициент сцепления шин с дорогой ![]() при торможении зависит от многих факторов. Предельные значения коэффициента
при торможении зависит от многих факторов. Предельные значения коэффициента ![]() для нашего случая составляет 0,65.
для нашего случая составляет 0,65.
Величина тормозных сил зависит от конструкции тормозной системы, ее
технического состояния, распределения нагрузки на осях автомобиля и от управляющего воздействия водителя. При торможении на горизонтальной дороге нормальные реакции могут быть найдены по следующим формулам:
 ;
;
 (18)
(18)
где: ![]() - компоновочные параметры;
- компоновочные параметры;
![]() - высота центра тяжести АТС.
- высота центра тяжести АТС.
Поскольку силы сцепления колес с дорогой при торможении переднего и заднего мостов равны:
![]() ;
;
![]() (19)
(19)
То, тормозные реакции колес изменяются в зависимости от интенсивности торможения и нагрузки на колесах. В расчетах часто допускают, что тормозные реакции всех колес практически не отличаются и достигают максимальных значений. Тогда время от начала воздействия водителя на педаль тормоза до остановки автомобиля, т.е. время торможения:
![]() (20)
(20)
а время от начала возникновения опасной ситуации до остановки АТС (время остановки):
![]() (21)
(21)
где: ![]() - время реакции водителя (
- время реакции водителя (![]() );
);
![]() - время срабатывания (запаздывания) тормозной системы, для одиночного автомобиля с гидравлическим приводом тормозов
- время срабатывания (запаздывания) тормозной системы, для одиночного автомобиля с гидравлическим приводом тормозов ![]() , а с пневматическим приводом -
, а с пневматическим приводом - ![]() ;
;
![]() - время нарастания замедления;
- время нарастания замедления;
![]() - продолжительность снижения скорости до остановки при установившемся замедлении (интервал времени, в котором: замедление постоянно).
- продолжительность снижения скорости до остановки при установившемся замедлении (интервал времени, в котором: замедление постоянно).
В расчетах можно принять следующие значения
![]() - для легковых автомобилей;
- для легковых автомобилей;
0,05 - 0,4 - для грузовых автомобилей с гидроприводом;
0,15 - 1,5 - для грузовых автомобилей с пневмоприводном;
Тормозной путь (расстояние, пройденное автомобилем от момента нажатия на тормозную педаль до полной остановки автомобиля) можно определить по следующей формуле:
 (22)
(22)
а остановочный путь:
 (23)
(23)
где: ![]() ,
, ![]() ,
, ![]() ,
, ![]() - расстояния, пройденные АТС с начальной скоростью
- расстояния, пройденные АТС с начальной скоростью ![]() за время
за время ![]() ,
, ![]() ,
, ![]() и
и ![]() соответственно.
соответственно.
При полном использовании сцепления с дорогой всеми колесами автомобиля замедление можно определить по формуле (16).
У многих автомобилей достичь одновременно блокировки всех колес практически не возможно по различным причинам. Поэтому для приближенных расчетов используют поправочный коэффициент эффективности торможения ![]() . В случае, когда коэффициент сцепления шин с дорогой
. В случае, когда коэффициент сцепления шин с дорогой ![]() , для легковых автомобилей можно принять
, для легковых автомобилей можно принять ![]() , для грузовых автомобилей полной массой (весом) менее 10 т
, для грузовых автомобилей полной массой (весом) менее 10 т ![]() , для автобусов и грузовых автомобилей с полной массой более 10 т
, для автобусов и грузовых автомобилей с полной массой более 10 т ![]() . При малом коэффициенте сцепления шин с дорогой
. При малом коэффициенте сцепления шин с дорогой ![]() ) для автомобилей всех типов следует принимать
) для автомобилей всех типов следует принимать ![]() .
.
На основе формул (18-23) и с учетом коэффициента эффективности тормозных механизмов значения максимально возможного установившего замедления, время и путь остановки автомобиля в случае приближенных расчетов можно определять по следующим формулам:
![]() (24)
(24)
![]() (25)
(25)
 (26)
(26)
Здесь сопротивление дороги
![]()
где: ![]() - угол продольного уклона дороги. В нашем случае берем значение 20
- угол продольного уклона дороги. В нашем случае берем значение 20
![]() - коэффициент сопротивления качению в нашем случае берем значение 0,03
- коэффициент сопротивления качению в нашем случае берем значение 0,03
![]()
Принято также характеризовать рабочую тормозную систему коэффициентом распределения тормозной силы ![]() по осям и по колесам на одной оси
по осям и по колесам на одной оси ![]() :
:
![]()
 (27)
(27)
где: ![]() и
и ![]() - тормозные силы на колесах передней
- тормозные силы на колесах передней ![]() и задней
и задней ![]() осей;
осей;
![]() и
и ![]() -тормозные силы на правом и левом колесах.
-тормозные силы на правом и левом колесах.
Значения коэффициентов ![]() и
и ![]() вычисляют по формулам (27) на основе стендовых испытаний тормозных систем автомобилей.
вычисляют по формулам (27) на основе стендовых испытаний тормозных систем автомобилей.
Применяя формулы (17, 25-26) рассчитываем основные параметры (![]() ,
, ![]() и
и ![]() ) в зависимости от начальной скорости автомобиля в процессе экстренного торможения до полной остановки:
) в зависимости от начальной скорости автомобиля в процессе экстренного торможения до полной остановки:
Для значения начальной скорости автомобиля 5![]() :
:



Для значения начальной скорости автомобиля 10![]() :
:



Для значения начальной скорости автомобиля 15![]() :
:

![]()

Для значения начальной скорости автомобиля 20![]() :
:
![]()


Для значения начальной скорости автомобиля 25![]() :
:

![]()

Для значения начальной скорости автомобиля 30![]() :
:
![]()
![]()

Рассчитаем значения показателей тормозных свойств в зависимости от коэффициента сцеплении шин с дорогой:
Для значения коэффициента сцепления шин с дорогой 0,8
![]()
![]()

Для значения коэффициента сцепления шин с дорогой 0,7
![]()
![]()

Для значения коэффициента сцепления шин с дорогой 0,6
![]()

![]()
Для значения коэффициента сцепления шин с дорогой 0,5
![]()


Для значения коэффициента сцепления шин с дорогой 0,4
![]()
![]()

Для значения коэффициента сцепления шин с дорогой 0,3
![]()


Полученные значения вносим в таблицы 6 и 7 и на их основе строим соответствующие графики.
Таблица 6.Расчетные значения показателей тормозных свойств в зависимости от скорости автомобиля
| 5 | 10 | 15 | 20 | 25 | 30 | |
| 3.84 | 5.09 | 5.51 | 5.72 | 5.81 | 6.02 | |
| 2.18 | 2.83 | 4.08 | 5.04 | 5.99 | 6.96 | |
| 8.51 | 9.55 | 30.42 | 57.36 | 59.66 | 122.64 |
Таблица 7 .Расчетные значения показателей тормозных свойств в зависимости от коэффициента сцепления шин с дорогой
| 7.37 | 6.52 | 5.66 | 4.81 | 3.96 | 3.11 | |
| 3.87 | 4.21 | 4.65 | 5.27 | 6.14 | 7.49 | |
| 49.4 | 52.78 | 57.34 | 63.07 | 71.56 | 84.68 |
Вывод: графики зависимости установившегося замедления, тормозного пути и времени торможения от начальной скорости автомобиля показываю что чем выше начальная скорость автомобиля тем больший путь пройдет данный автомобиль прежде чем остановиться, следовательно и времени на это ему также понадобиться больше. Установившееся замедление также будет возрастать по мере увеличения начальной скорости, но данная зависимость не прямая: величина замедления резко увеличивается, по мере изменения начальной скорости автомобиля в интервале от 5 до 15 ![]() , при дальнейшем увеличении начальной скорости, замедление увеличивается незначительно. Так например автомобилю двигающемуся со скоростью 5
, при дальнейшем увеличении начальной скорости, замедление увеличивается незначительно. Так например автомобилю двигающемуся со скоростью 5![]() для экстренной остановки понадобится 2.18 секунды и 8.51 метров остановочного пути, а при скорости 30
для экстренной остановки понадобится 2.18 секунды и 8.51 метров остановочного пути, а при скорости 30![]() более 6.96 секунд и 122.64 метров остановочного пути.
более 6.96 секунд и 122.64 метров остановочного пути.
Графики зависимости показателей тормозных свойств автомобиля от коэффициента сцепления шин с дорогой при постоянной скорости автомобиля указывает четкую зависимость, остановочного пути и времени, а также величины замедления автомобиля от коэффициента сцепления шин с дорогой. При высоком показатели сцепления шин с дорогой, автомобиль обладает более высоким замедлением и ему понадобиться меньше времени, что бы остановиться, следовательно, и пройденный путь будет меньше.
4. Устойчивость автотранспортных средств
4.1 Расчет показателей устойчивости автомобиля
Устойчивость - совокупность свойств, определяющих положение автотранспортного средства или его звеньев при движении. Нарушение устойчивости АТС выражается в произвольном изменении направления движения, его опрокидывании или скольжения шин по дороге. Оценочными показателями устойчивости являются критические параметры движения и положения. Различают продольную и поперечную устойчивость автомобиля. Признаками потери поперечной устойчивости являются: изменение направления движения (курсовая устойчивость); поперечное скольжение (занос) и опрокидывание, а продольной устойчивости - буксование ведущих колес и опрокидывание.
Потеря автомобилем продольной устойчивости выражается, как правило, в буксовании ведущих колес, часто наблюдаемое при преодолевании автопоездами затяжных подъемов при скользкой дороге. Опрокидывание АТС в продольной плоскости возможно лишь при дорожно-транспортном происшествии.
Показателями курсовой устойчивости служат средняя скорость поперечного смещения без корректирующих воздействий со стороны водителя ![]() и средняя угловая скорость поворота рулевого колеса
и средняя угловая скорость поворота рулевого колеса ![]() Эти показатели определяют экспериментально при испытании АТС.
Эти показатели определяют экспериментально при испытании АТС.
Показателями поперечной устойчивости автомобиля при криволинейном движении являются критические скорости (максимально возможные) по боковому скольжению ![]()
![]() и боковому опрокидыванию
и боковому опрокидыванию ![]()
![]() , критические углы косогора (угол поперечного уклона дороги) по боковому скольжению
, критические углы косогора (угол поперечного уклона дороги) по боковому скольжению ![]()
![]() и по боковому опрокидыванию
и по боковому опрокидыванию ![]()
![]() .
.
В данной работе необходимо определить расчётными методами величины практических скоростей поперечного скольжения и опрокидывания в зависимости от радиуса поворота дороги в плане и дорожных условий. С этой целью можно использовать выражения для критической скорости при движении автомобиля на повороте:
- для случая поперечного скольжения
![]()
![]() (28)
(28)
- для случая поперечного опрокидывания
![]()
 (29)
(29)
где: ![]() - радиус поворота,
- радиус поворота, ![]() ;
;
![]() - среднее значение колеи автомобиля,
- среднее значение колеи автомобиля, ![]() . Для автомобиля ВАЗ-21099 составляет 1,385
. Для автомобиля ВАЗ-21099 составляет 1,385![]() ;
;
![]() - угол поперечного уклона дороги, град;
- угол поперечного уклона дороги, град;
![]() - высота центра тяжести полностью груженого автомобиля,
- высота центра тяжести полностью груженого автомобиля, ![]() ;
;
![]() - коэффициент поперечного сцепления шин с дорогой.
- коэффициент поперечного сцепления шин с дорогой.
В случае, когда ![]() :
:
![]()
![]() (30)
(30)
![]()
![]() (31)
(31)
![]() (32)
(32)
Здесь ![]() - коэффициент поперечной устойчивости автомобиля.
- коэффициент поперечной устойчивости автомобиля.
Из условия равенства поперечных сил сцепления шин с дорогой и поперечных сил, действующих на автомобиль при движении на повороте
![]() (33)
(33)
можно также найти максимальный угол поперечного уклона дороги (косогора), по которой автомобиль движется без скольжения:
 (34)
(34)
Как следует из выражения (34) на прямолинейном участке дороги
![]()
Из уравнения моментов сил относительно оси, проходящей через контакты шин внешних колес, находят значение максимально допустимого угла косогора, по которому автомобиль может двигаться без опрокидывания:
 (35)
(35)
Из формулы (35) очевидно, что при движении на прямолинейном участке
![]()
т.е. ![]() равен коэффициенту поперечной устойчивости автомобиля
равен коэффициенту поперечной устойчивости автомобиля ![]() . Вышеприведенные формулы (28 - 31, 34, 35), используемые для расчета параметров
. Вышеприведенные формулы (28 - 31, 34, 35), используемые для расчета параметров ![]()
![]() ,
, ![]()
![]() ,
, ![]() ,
, ![]() , справедливы лишь для случая, когда предполагают, что автомобиль представляет собой жесткую систему. В действительности он является сложной системой с шарнирными и упругими связями и элементами. Поэтому под действием поперечных сил кузов автомобиля поворачивается и наклоняется в поперечном направлении. При этом упругие элементы подвески (рессоры, пружины и т.д.) деформируются. Упруго деформируются и шины АТС. С учетом этих элементов критическая скорость опрокидывания на 10-15% меньше, чем полученная для жесткой системы.
, справедливы лишь для случая, когда предполагают, что автомобиль представляет собой жесткую систему. В действительности он является сложной системой с шарнирными и упругими связями и элементами. Поэтому под действием поперечных сил кузов автомобиля поворачивается и наклоняется в поперечном направлении. При этом упругие элементы подвески (рессоры, пружины и т.д.) деформируются. Упруго деформируются и шины АТС. С учетом этих элементов критическая скорость опрокидывания на 10-15% меньше, чем полученная для жесткой системы.
При определении критической скорости поперечного скольжения часто допускают, что продольные силы отсутствуют и колеса обоих осей автомобиля скользят в поперечном направлении одновременно. Такое явление в практике наблюдается очень редко, обычно раньше начинают скользить колеса или переднего, или заднего мостов.
Без учета динамических нагрузок критическую скорость скольжения колес передней оси определяют по следующей формуле:
![]()
![]() (36)
(36)
а задней:
![]()
![]() (37)
(37)
где: ![]() - удельная касательная реакция,
- удельная касательная реакция, ![]() ;
;
![]() и
и ![]() - коэффициенты изменения вертикальных реакций при разных режимах движения;
- коэффициенты изменения вертикальных реакций при разных режимах движения;
![]() - угол поворота управляемых колес.
- угол поворота управляемых колес.
Для двухосных автомобилей в активном режиме ![]() =0,8-0,9;
=0,8-0,9; ![]() =1,05-1,1; в режиме торможения -
=1,05-1,1; в режиме торможения - ![]() =1,2-1,3;
=1,2-1,3; ![]() =0,7-0,8.
=0,7-0,8.
При активных режимах движения у заднеприводных автомобилей ![]() ,
, ![]() , т.е.
, т.е. ![]() , а при торможении -
, а при торможении - ![]() Поэтому во всех случаях
Поэтому во всех случаях ![]()
![]()
![]() , т.е. наиболее вероятен занос заднего моста, что приводит к изменению мгновенного радиуса поворота автомобиля, соответственно, к росту центробежной силы и непрерывному изменению радиуса поворота. Такое движение автомобиля называется заносом. Занос чрезвычайно опасен, т.к. развивается очень быстро и может привести к опрокидыванию АТС.
, т.е. наиболее вероятен занос заднего моста, что приводит к изменению мгновенного радиуса поворота автомобиля, соответственно, к росту центробежной силы и непрерывному изменению радиуса поворота. Такое движение автомобиля называется заносом. Занос чрезвычайно опасен, т.к. развивается очень быстро и может привести к опрокидыванию АТС.
В данной работе по приведенным выше формулам определяем значения ![]()
![]() ,
, ![]()
![]() ,
, ![]()
![]() и
и ![]()
![]() согласно заданию.
согласно заданию.
Величина высоты центра тяжести ![]() зависит от марки автомобиля, степени нагрузки. По формуле (32) можно определить также величину
зависит от марки автомобиля, степени нагрузки. По формуле (32) можно определить также величину ![]() , если задан коэффициент
, если задан коэффициент ![]() , значения которого для отечественных автомобилей находятся в пределах: для легковых - 0,95-1,15; для грузовых - 0,6 - 0,8; для автобусов - 0,9-1,2.
, значения которого для отечественных автомобилей находятся в пределах: для легковых - 0,95-1,15; для грузовых - 0,6 - 0,8; для автобусов - 0,9-1,2.
![]()
![]()
Рассчитаем значения критических скоростей скольжения и опрокидывания в зависимости от радиуса поворота дороги:
Для значения радиуса поворота 20![]()
![]()
![]()
![]()

Для значения радиуса поворота 40![]()
![]()
![]()
![]()
Для значения радиуса поворота 60![]()
![]()
![]()
![]()

Для значения радиуса поворота 80![]()
![]()
![]()
![]()

Для значения радиуса поворота 100![]()
![]()
![]()
![]()
![]()
Для значения радиуса поворота 120![]()
![]()
![]()
![]()

Рассчитаем значения угла опрокидывания и скольжения в зависимости от скорости автомобиля и радиуса поворота:
Для значения скорости 5![]() и радиуса поворота 20
и радиуса поворота 20![]()
![]()

Для значения скорости 10![]() и радиуса поворота 40
и радиуса поворота 40![]()
![]()

Для значения скорости 15![]() и радиуса поворота 60
и радиуса поворота 60![]()
![]()

Для значения скорости 20![]() и радиуса поворота 80
и радиуса поворота 80![]()
![]()
![]()
Для значения скорости 25![]() и радиуса поворота 100
и радиуса поворота 100![]()
![]()
![]()
Для значения скорости 30![]() и радиуса поворота 120
и радиуса поворота 120![]()
![]()

Результаты расчетов заносим в таблицы 8 и 9.
Таблица 8.Расчетные значения ![]()
![]() и
и ![]()
![]() в зависимости от
в зависимости от ![]()
| 20 | 40 | 60 | 80 | 100 | 120 | |
| 10.39 | 14.69 | 17.99 | 20.78 | 23.23 | 25.45 | |
| 14.36 | 20.31 | 24.87 | 28.72 | 32.11 | 35.17 |
Таблица 9
.Расчетные значения ![]()
![]() и
и ![]()
![]() в зависимости от скорости автомобиля
в зависимости от скорости автомобиля
| 20 | 40 | 60 | 80 | 100 | 120 | |
| 5 | 10 | 15 | 20 | 25 | 30 | |
| 0.39 | 0.26 | 0.14 | 0.031 | -0.065 | -0.15 | |
| 0.32 | 0.092 | 0.055 | 0.017 | 0.008 | 0.004 |
Графики зависимости критической скорости заноса и опрокидывания от радиуса поворота дороги показывает что чем больше радиус поворота, тем больше значение критических скоростей по заносу и опрокидыванию, данная зависимость практически прямая и показывает, что опрокидывание автомобиля во время прохождения поворота, практически не возможно в следствии высоких зачетных скоростей опрокидывания. Так скорость опрокидывания при повороте радиусом 20 метров, составляет 10,39м/с, что является еще достижимым значением для современных автомобилей. Для радиуса поворота в 60 метров скорость опрокидывания составит уже 17,99 м/с.
Графики зависимости опрокидывания и скольжения от скорости автомобиля показывают что чем выше скорость автомобиля, тем меньше значение уклона который может вызвать скольжение или опрокидывание автомобиля.
5. Поворачиваемость автотранспортных средств
5.1 Определение шинной поворачиваемости автомобиля
Поворачиваемостью называют способность автомобиля изменять направление движения баз поворота управляемых колес. Существуют две причины поворачиваемости под действием боковых сил: увод колес в результате поперечной деформации шин; поперечный крен, обусловленный упругой деформацией рессор, пружин и других упруго-деформируемых элементов автомобиля.
Уводом называют качение колеса под углом к своей плоскости. Причиной увода является то, что шины обладают не только радиальной, но и боковой эластичностью. Под действием боковых сил (поперечный уклон дороги, поворот автомобиля, боковой ветер) шины колес деформируются в поперечном направлении и колесо начинает катиться под некоторым углом ![]() к первоначальной, т.е. заданной водителем траектории. Этот угол называют углом увода.
к первоначальной, т.е. заданной водителем траектории. Этот угол называют углом увода.
Между боковой силой и углом увода существует определенная зависимость. При малых боковых силах шина деформируется без скольжения элементов ее контакта с дорогой, сила увода и угол при этом увода связаны зависимостью
![]() (37)
(37)
где:![]() - коэффициент сопротивления уводу,
- коэффициент сопротивления уводу, ![]()
Величина ![]() , зависит от многих факторов: вертикальной
, зависит от многих факторов: вертикальной ![]() и касательной
и касательной ![]() сил, приложенных к колесу; угла наклона колеса к вертикали (угол развала); давления воздуха в шине; ширины обода колеса; жесткости каркаса шины; степени износа протектора и т.д. Их влияние на
сил, приложенных к колесу; угла наклона колеса к вертикали (угол развала); давления воздуха в шине; ширины обода колеса; жесткости каркаса шины; степени износа протектора и т.д. Их влияние на ![]() учитывается экспериментальными поправочными коэффициентами
учитывается экспериментальными поправочными коэффициентами ![]() :
:
![]()
где: ![]() и т.д.- коэффициенты, учитывающие влияние указанных факторов на коэффициент сопротивления уводу.
и т.д.- коэффициенты, учитывающие влияние указанных факторов на коэффициент сопротивления уводу.
Для шин легковых автомобилей ![]() =15 - 40
=15 - 40 ![]() , а для грузовых автомобилей и автобусов
, а для грузовых автомобилей и автобусов ![]() =30 - 100
=30 - 100 ![]() .
.
Максимальные углы увода шин составляют 12 - 14, а средние – 2 - 6 градусов.
При наличии увода центр поворота автомобиля смещается пропорционально углу увода задних колес, если смотреть по схеме от точки ![]() в точку
в точку ![]() и мгновенный центр поворота уменьшается до.
и мгновенный центр поворота уменьшается до. ![]() . Из схемы очевидно, что
. Из схемы очевидно, что
![]() (38)
(38)
Из выражения (38) имеем
 (39)
(39)
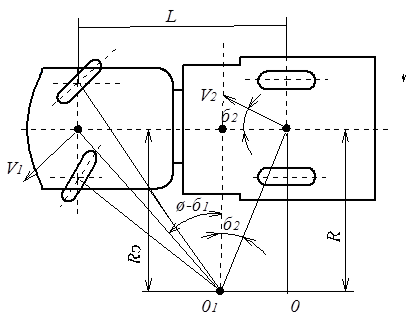
Схема движения автомобиля на повороте с эластичными шинами
![]() - угол поворота управляемых колес;
- угол поворота управляемых колес;
![]() и
и ![]() - векторы скоростей качения передней и задней осей колес;
- векторы скоростей качения передней и задней осей колес;
![]() - колесная база
- колесная база
Из зависимости (39) следует, что под действием боковых сил автомобиль может двигаться криволинейно и при ![]() , т.е. когда управляемые колеса не поворачиваются, а кривизна траектории зависит от соотношения углов
, т.е. когда управляемые колеса не поворачиваются, а кривизна траектории зависит от соотношения углов ![]() и
и ![]() . Если
. Если ![]() , то радиус
, то радиус ![]() равен бесконечности, т.е. автомобиль, движется прямолинейно. Тогда шинную поворачиваемость автомобиля называют нейтральной. Однако автомобиль, имеющий нейтральную поворачиваемость, под действием боковых сил будет двигаться прямолинейно, но под углом
равен бесконечности, т.е. автомобиль, движется прямолинейно. Тогда шинную поворачиваемость автомобиля называют нейтральной. Однако автомобиль, имеющий нейтральную поворачиваемость, под действием боковых сил будет двигаться прямолинейно, но под углом ![]() к прежнему (заданному водителем) направлению движения. Если
к прежнему (заданному водителем) направлению движения. Если ![]() - шинную поворачиваемость называют недостаточной. При прямолинейном движении в таком случае автомобиль поворачивается вокруг центра, но составляющая центробежной силы
- шинную поворачиваемость называют недостаточной. При прямолинейном движении в таком случае автомобиль поворачивается вокруг центра, но составляющая центробежной силы ![]() направлена в сторону противоположную поперечной силе, что уменьшает результирующую силу.
направлена в сторону противоположную поперечной силе, что уменьшает результирующую силу.
Если ![]() - шинную поворачиваемость называют излишней. В таком случае центробежная сила совпадает по .направлению с внешней силой, что увеличивает вероятность заноса или опрокидывания.
- шинную поворачиваемость называют излишней. В таком случае центробежная сила совпадает по .направлению с внешней силой, что увеличивает вероятность заноса или опрокидывания.
Для количественной оценки шинной поворачиваемости автомобиля также служит коэффициент поворачиваемости:
![]() (40)
(40)
где: ![]() и
и ![]() - осевые нагрузки на соответствующие оси,
- осевые нагрузки на соответствующие оси, ![]() В нашем случае нагрузка на переднюю и заднюю оси, полностью груженного автомобиля ВАЗ-21099 составляет 6750 и 6650
В нашем случае нагрузка на переднюю и заднюю оси, полностью груженного автомобиля ВАЗ-21099 составляет 6750 и 6650 ![]() соответственно.
соответственно.
При излишней шинной поворачиваемости - ![]() ;
;
при нейтральной - ![]() ,
,
при недостаточной - ![]() .
.
Креновая поворачиваемость связана с конструкцией подвески. Под действием боковых сил кузов автомобиля (его надрессоренная часть) наклоняется, вызывая сжатие рессор с одной стороны и распрямление других, в результате мост поворачивается в горизонтальной плоскости от вертикальной оси, проходящей через центр моста. Если углы поворота переднего и заднего мостов не одинаковы по величине и направлению, то автомобиль вследствие крена поворачивается, хотя передние колеса остаются в нейтральном положении.
Увод автомобиля зависит также от развала колеса. Если направление поперечной силы совпадает с направлением развала, то увод увеличивается. Развал колеса, равный 1°, вызывает увод на угол 10-20°. При двухрычажной подвеске колеса наклоняются в сторону крена кузова в направлении действия поперечной силы ![]() , что увеличивает -угол увода моста. Приоднорычажной подвеске колеса наклоняются в сторону, противоположную крену кузова, т.е. навстречу поперечной силе, что уменьшает угол увода моста.
, что увеличивает -угол увода моста. Приоднорычажной подвеске колеса наклоняются в сторону, противоположную крену кузова, т.е. навстречу поперечной силе, что уменьшает угол увода моста.
Потеря управляемости у автомобиля, имеющего излишнюю поворачиваемоеть, может наступить и при отсутствии боковой силы а случае достижения некоторой скорости, называемой критической ![]() . Поскольку углы увода
. Поскольку углы увода ![]() и
и ![]() пропорциональны боковым силам, то
пропорциональны боковым силам, то
![]()
 (41)
(41)
где ![]() — скорость автомобиля.
— скорость автомобиля.
При ![]() из выражений (39) и (41) имеем:
из выражений (39) и (41) имеем:
 (42)
(42)
Отсюда:
 (43)
(43)
В расчетной части необходимо рассчитать значения ![]() и
и ![]() в зависимости от изменения нагрузки на оси автомобиля. В нашем случае мы ведем расчет для автомобиля ВАЗ-21099. Так как распределение нагрузки по осям у данного автомобиля равномерно, то достаточно рассчитать значения
в зависимости от изменения нагрузки на оси автомобиля. В нашем случае мы ведем расчет для автомобиля ВАЗ-21099. Так как распределение нагрузки по осям у данного автомобиля равномерно, то достаточно рассчитать значения ![]() и
и ![]() для полностью загруженного автомобиля при различных значениях
для полностью загруженного автомобиля при различных значениях ![]() . Расчеты ведем по формулам (40) и (43) с учетом выражений (37-39)
. Расчеты ведем по формулам (40) и (43) с учетом выражений (37-39)
![]()
![]()
![]()
![]()
![]()
![]()
Вычисленные значения ![]() и
и ![]() заносим в таблицу 10 и строим график соответствующей зависимости
заносим в таблицу 10 и строим график соответствующей зависимости
Таблица. 10 Расчетные значения ![]() и
и ![]() для полностью загруженного автомобиля
для полностью загруженного автомобиля
| 30 | 45 | 60 | 75 | 90 | 110 | |
| 1,014 | 1,014 | 1,014 | 1,014 | 1,014 | 1,014 | |
| 1,856 | 3,24 | 3,47 | 4,41 | 4,64 | 5,15 |
Вывод: график зависимости коэффициента поворачиваемости и скорости увода от коэффициента сопротивления уводу полностью груженного автомобиля, показывает что расчетный автомобиль имеет постоянное значение коэффициента поворачиваемости, не зависящие от коэффициента увода. Оно составляет 1,014 и соответствует слегка излишней поворачиваемости.
Скорость увода же постоянно растет с увеличение значения коэффициента увода: так для значения коэффициента увода в 45![]() , скорость увода составит 3,24 м/c
, скорость увода составит 3,24 м/c
6. Информативность автотранспортных средств
6.1 Определение показателей эффективности автономного освещения автомобиля
Информативность является одной из важных эксплуатационных характеристик автомобиля, влияющая на его безопасность. Она представляет собой совокупность потенциальных свойств, присущих автомобилю, обеспечивающих участников дорожного движения необходимой информацией.
Для водителя информативность автотранспортных средств можно разделить на внутреннюю, исходящую от автомобиля, управляемого им; на внешнюю, исходящую от других транспортных средств, дороги и окружающей среды. Внешней визуальной информативностью обладает кузов и световозвращатели, относящиеся к пассивным, а также система автономного освещения и внешней световой сигнализации, которые являются активными. Информативность автомобиля может быть визуальной, звуковой и тактильной. Свыше 90 % всей информации водитель получает с помощью зрения, т.е. визуально.
Для создания необходимых условий безопасного движения в темное время автомобиль оборудован фарами: ближнего, дальнего, противотуманного и скоростного света (прожекторы дальнего света), фонарями заднего хода. Фары ближнего света предназначены для освещения дороги впереди автомобиля при наличии движущихся навстречу транспортных средств, а фары дальнего света - при их отсутствии. При применении широкоугольных (противотуманных) фар улучшается видимость при движении в случае пониженной прозрачности атмосферы (туман, дождь, снег и т.д.),проезда по дорогам с малым: кривым поворота, проезда пересечений, в городах и населенных пунктах, т.к. они лучше освещают пешеходные дорожки и тротуары.
Нормативными документами, регламентирующими количество, расположение, цвет, углы видимости и светотехнические характеристики фаз, являются JSO – R303, Пр.№1, 19, 20, 48 КВТ ЕЭК ООН, ГОСТ 8769-75, ГОСТ 3544-75 и ГОСТ 10984-74.
Яркость - отношение силы света источника к площади светящейся поверхности, измеряется в ![]() . Яркость автомобильной фары в зависимости от типа ламп составляет 0,05 - 0,5
. Яркость автомобильной фары в зависимости от типа ламп составляет 0,05 - 0,5![]() , яркость Солнца в ясную погоду
, яркость Солнца в ясную погоду ![]() . Поэтому освещенность
. Поэтому освещенность ![]() (отношение светового потока к площади освещаемой поверхности) объектов в темное время суток значительно хуже, чем в дневное время. В правилах ЕЭК ООН светораспределение фар нормируется в единицах освещенности,
(отношение светового потока к площади освещаемой поверхности) объектов в темное время суток значительно хуже, чем в дневное время. В правилах ЕЭК ООН светораспределение фар нормируется в единицах освещенности,![]() (люкс):
(люкс):
![]()
где:![]() - вертикальная освещенность, создаваемая фарой на специальном измерительном экране,
- вертикальная освещенность, создаваемая фарой на специальном измерительном экране, ![]() ;
;
![]() - сила света в заданном направлении,
- сила света в заданном направлении, ![]() ;
;
![]() - расстояние от фары до измерительного экрана, м.
- расстояние от фары до измерительного экрана, м.
Физиологическая видимость дороги и объектов характеризует возможность зрительного обнаружения их. Эта возможность зависит от яркости фона ![]() и объекта
и объекта ![]() , оценивается величиной яркостного контраста:
, оценивается величиной яркостного контраста:
![]()
а видимость принято определять как отношение фактического контраста ![]() к его пороговому значению
к его пороговому значению ![]()

где: ![]() ;
;
![]() и
и ![]() - коэффициенты, определяемые экспериментально.
- коэффициенты, определяемые экспериментально.
При управлении транспортным средством в темное время суток яркость фона ![]() (адаптации) определяется уровнем средней яркости дорожного покрытия при действии света автомобильных фар, значения которой не превышает 2
(адаптации) определяется уровнем средней яркости дорожного покрытия при действии света автомобильных фар, значения которой не превышает 2 ![]() .
.
Видимость в значительной степени зависит от слепящего действия фар встречных автомобилей, количественной мерой которого является коэффициент ослепленности:
![]() (44)
(44)
где: ![]() - разность пороговых яркостей при наличии слепящих источников;
- разность пороговых яркостей при наличии слепящих источников;
![]() - тоже при их отсутствии.
- тоже при их отсутствии.
Из выражения (44) следует, что при отсутствии слепящих источников ![]() .
.
Если ![]() , то видимость практически отсутствует.
, то видимость практически отсутствует.
Основным и наиболее важным показателем эффективности системы автономного освещения автомобиля является безопасная скорость, которая определяется из условия дальности видимости и остановочного пути:
![]()
где: ![]() - установившееся замедление (см.формулы (16 и 17)),
- установившееся замедление (см.формулы (16 и 17)), ![]() ;
;
![]() - суммарное время реакции
- суммарное время реакции ![]() , срабатывания
, срабатывания ![]() , нарастания тормозных сил
, нарастания тормозных сил ![]() и дополнительное время реакции, необходимое для восприятия препятствий в темное время суток
и дополнительное время реакции, необходимое для восприятия препятствий в темное время суток ![]() , (
, (![]() ;
;![]() для одиночного автомобиля;
для одиночного автомобиля; ![]() ;
; ![]() )
)
![]()
![]() - расстояние видимости препятствий,
- расстояние видимости препятствий, ![]() .
.
Критерием безопасности по условиям видимости может служить коэффициент видимости, представляющий собой отношение дальности видимости ![]() к необходимой дальности определяемой скоростью движения
к необходимой дальности определяемой скоростью движения ![]()
![]() (45)
(45)
Величина, обратная коэффициенту видимости ![]() называется коэффициент опасности движения:
называется коэффициент опасности движения:
![]() (46)
(46)
Из выражения (45) очевидно, что, если ![]() , то безопасность движения обеспечена по видимости. Если
, то безопасность движения обеспечена по видимости. Если ![]() , то условия освещения- не обеспечивают безопасности движения.
, то условия освещения- не обеспечивают безопасности движения.
Расстояние видимости ![]() зависит от расстояния освещения
зависит от расстояния освещения ![]() но меньше на величин
но меньше на величин ![]() ,т.е.
,т.е.
![]() (47)
(47)
где: ![]() - эмпирический коэффициент, зависящий от динамики восприятия освещаемых объектов при движении, находящихся в поле зрения;
- эмпирический коэффициент, зависящий от динамики восприятия освещаемых объектов при движении, находящихся в поле зрения;
![]() - скорость движения автомобиля.
- скорость движения автомобиля.
Можно принять![]()
Поправка ![]() учитывает тот факт, что с увеличением скорости сокращается расстояние, на котором препятствие на дороге может быть обнаружено, т.к. в динамических условиях восприятие различных объектов на дороге или на обочине требует большей их освещенности. Значения
учитывает тот факт, что с увеличением скорости сокращается расстояние, на котором препятствие на дороге может быть обнаружено, т.к. в динамических условиях восприятие различных объектов на дороге или на обочине требует большей их освещенности. Значения ![]() нужно определить по формуле (45).
нужно определить по формуле (45).
Для определения предельной скорости движения в условиях плохой видимости в данной работе необходимо рассчитать по формулам (45), (46) и (47) коэффициенты видимости и опасности движения в зависимости от скорости и при разной освещенности или силы света фар.
Расстояние максимального освещения ![]() для фар ближнего света можно принять в диапазоне 25 - 75
для фар ближнего света можно принять в диапазоне 25 - 75![]() , а для фар дальнего света - 100 — 400
, а для фар дальнего света - 100 — 400![]() (в
(в
зависимости от используемых фар и ламп).
Рассчитаем значения ![]() в зависимости от скорости автомобиля:
в зависимости от скорости автомобиля:
![]()
![]()
![]()
![]()
![]()
![]()
Рассчитаем значения ![]() в зависимости от скорости автомобиля:
в зависимости от скорости автомобиля:
Для скорости 20![]()

 ;
;


![]()
![]()
![]()
Для скорости 40![]()
![]()
 ;
;


![]()
![]()
![]()
![]()
Для скорости 60![]()
![]()
![]() ;
;


![]()
![]()
![]()
![]()
Для скорости 80![]()
![]()
![]() ;
;


![]()
![]()
![]()
![]()
Для скорости 100![]()
![]()
 ;
;


![]()
![]()
![]()
Для скорости 120![]()
![]()
 ;
;


![]()
![]()
![]()
Рассчитаем значения ![]() и
и ![]() в зависимости от скорости автомобиля:
в зависимости от скорости автомобиля:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Полученные значения заносим в таблицу 11
Таблица 11.Расчетные значения ![]() ,
, ![]() ,
, ![]() и
и ![]() в зависимости от скорости автомобиля
в зависимости от скорости автомобиля
| 20 | 40 | 60 | 80 | 100 | 120 | |
| 5,55 | 11,11 | 16,66 | 22,22 | 27,77 | 33,33 | |
| 10.23 | 15.84 | 28.89 | 48.55 | 71.97 | 101.86 | |
| 37.23 | 34.45 | 31.67 | 29.89 | 26.12 | 23.34 | |
| 3.64 | 2.18 | 1.192 | 0.620 | 0.363 | 0.229 | |
| 0.275 | 0.460 | 0.912 | 1.613 | 2.755 | 4.364 |
Вывод
: из графиков зависимости коэффициентов видимости и опасности движения от скорости при разных расстояниях видно, что по мере увеличения скорости движения, коэффициент видимости резко снижается. Коэффициент опасности движения соответственно растет, так как данные величины являются обратными друг другу. Так, например, для скорости в 20 ![]() коэффициент видимости составляет 3.64, а коэффициент опасности движения 0,275 , для скорости 120
коэффициент видимости составляет 3.64, а коэффициент опасности движения 0,275 , для скорости 120 ![]() 0.229 и 4.364 соответственно.
0.229 и 4.364 соответственно.
По мере выполнения данного курсового проекта были изучены показатели влияющие на безопасность движения автотранспортных средств. Кроме того были изучены принципы и произведены расчеты этих показателей.
Для расчетов была взята базовая модель автомобиля ВАЗ-21099, используя данные технической характеристики по мере выполнения курсового проекта были рассчитаны ширина динамического коридора, данного автомобиля при движении на прямолинейном участке дороги; ширина динамического коридора на криволинейном участке; дистанции безопасности при движении автомобиля ВАЗ-21099 за грузовым автомобилем ЗИЛ-431410 на различных скоростях; время и путь обгона при постоянной скорости автомобилей и при ускорении обгоняющего автомобиля; тормозные показатели автомобиля, в зависимости от начальной скорости и коэффициента сцепления шин с дорогой; показатели устойчивости автомобиля при различных радиусах поворота и скорости движения; шинная поворачиваемость автомобиля и скорость увода, а также показатели эффективности автономного освещения автомобиля.
Как видно данная работа охватывает большой спектр систем автомобиля отвечающий за его безопасное движения, только при правильном расчете и учете данных показателей возможно грамотное производство и эксплуатация автотранспортных средств.
1. Хацац К.Г. - Методические указания к выполнению КР по предмету “БТС” - Майкоп 2006г.
2. Краткий автомобильный справочник НИИАТ - Москва 1983г.
Похожие рефераты:
Безопасность дорожного движения
Проектирование автомобильных дорог
Строительство автомобильной дороги
Оборудование летательных аппаратов
Особенности эксплуатации автомобильных шин
Исследование трасологических следов, образующихся при наезде транспортных средств на пешехода
Исследование особенностей технической эксплуатации ходовой части автомобилей "Toyota"
Тяговый и динамический расчет автомобиля ВАЗ-21093
Модернизация подвески автомобиля ЗАЗ1102 Таврия
Тормозная система автомобиля. Устройство и работа
Тормозные механизмы автомобиля КамАЗ: ремонт и техническое обслуживание