| Похожие рефераты | Скачать .docx |
Реферат: Тормозные устройства и механизмы подъема грузоподъемных машин
ФГОУ ВПО
НОВОСИБИРСКАЯ ГОСУДАРСТВЕННАЯ АКАДЕМИЯ ВОДНОГО ТРАНСПОРТА
Кафедра СМ и ПТМ
Лабораторная работа №6
Тема: «Тормозные устройства и механизмы подъема грузоподъемных машин»
Новосибирск 2008
Тормозные устройства
Назначение, принцип действия и классификация.
Удержание груза на весу, предотвращение недопустимого разгона груза при спуске, принудительное замедление движения механизма и остановка его обеспечиваются тормозами.
Принцип действия тормозов заключается в создании тормозного момента за счет трения между вращающимся шкивом и стационарными колодками или лентой, поверхностями дисков или конусов.
Конструктивно тормоза делятся на радиальные (колодочные и ленточные) и осевые (дисковые и конусные). Они могут быть управляемыми и автоматического действия, нормально открытыми (постоянно разомкнутые и замыкаемые по мере надобности) и нормально закрытыми (постоянно замкнутые и размыкаемые в момент начала работы механизма). Удержание тормоза в замкнутом состоянии может выполняться пружинами или специальным грузом. Размыкание автоматического тор моза производится либо электромагнитом, шарнирно прикрепленным к тормозному рычагу, либо различного рода толкателями, наибольшее распространение из которых получили электрогидравлические толкатели.
Закрытые тормоза более безопасны в работе, чем открытые, что особенно важно для механизмов подъема и изменения вылета стрелы, однако управление ими более тяжелое, в связи, с чем они применяются преимущественно с автоматическим управлением.
Все тормоза рассчитываются на величину тормозного момента, необходимую для остановки механизма на заданном пути или при заданном времени торможения.
Местом установки тормозного шкива обычно является наиболее быстроходный вал механизма, где действует наименьший крутящий момент, и, следовательно, тормоз имеет наименьшие габариты. В качестве тормозного шкива обычно используется одна из полумуфт соединения двигателя с редуктором. Для надежности работы необходимо, чтобы между тормозом и затормаживаемым элементом имелась жесткая связь.
Колодочные тормоза.
Наиболее распространенными в подъемно-транспортных машинах являются колодочные тормоза. Применяются самые разнообразные конструкции колодочных тормозов, различающиеся в основном по схемам рычажных систем. Колодок может быть одна или две.
Одноколодочные тормоза применяется для создания небольших тормозных моментов. Главным их недостатком является одностороннее давление на вал, в связи, с чем вал испытывает значительный изгибающий момент.
Колодки двухколодочного тормоза расположены диаметрально относительно шкива и создают равное, но противоположное давление на вал, что исключает изгибающий момент (рис. 1).
Тормозной момент двухколодочного тормоза состоит из суммы тормозных моментов, развиваемых каждой колодкой. Между колодками и шкивом под действием нормальных к поверхности шкива давлений N1 и N2, возникают силы трения мN1 и мN2, направление которых зависит от направления вращения шкива. Тормозной момент при диаметре шкива Dт будет ранен Mт = мNDт.
Так как величина тормозного момента находится в прямо пропорциональной зависимости от коэффициента трения между колодками и шкивом, то для уменьшения габаритов тормоза, уменьшения усилий на рычагах, в тормозах используются специальные материалы, обладающие повышенными фрикционными свойствами. Наиболее распространенными фрикционными материалами в тормозах ПТМ являются асбестовая и вальцованные ленты.
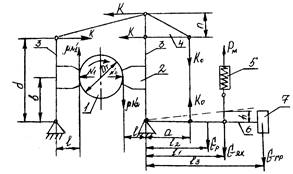
Рис. 1. Расчётная схема двухколодочного тормоза: 1 – тормозной шив, 2 – тормозные колодки, 3 – вертикальные рычаги, 4 – треугольник; 5 – электромагнит; 6 – горизонтальный рычаг; 7 – затормаживающий груз.
Фрикционный материал обычно крепят к тормозной колодке латунными или медными заклепками. Чтобы головка заклепки не повреждала поверхность шкива, ее делают утопленной во фрикционную накладку не менее, чем на половину толщины накладки. Центр заклепки должен располагаться не менее, чем в 15 мм от края накладки во избежание выкрашивания, расстояние между заклепками рекомендуется не менее 80-100 мм.
В последнее время все более применяется приклеивание фрикционного материала к колодкам термостойкими клеями.
Тормозные шкивы выполняются преимущественно стальными. Поверхность обода должна быть тщательно обработана и ,во избежание чрезмерною износа, обладать твердостью Нв=200-400 в зависимости от режима работы.
Управление колодочными тормозами осуществляется электромагнитами, электромеханическими и электрогидравлическими толкателями, включаемыми в электросеть параллельно двигателю механизма.
Поэтому размыкание тормоза и освобождение механизма происходи! одновременно с включением двигателя. При обесточивании привод тормоза и двигатель механизма выключаются, тормоз под действием замыкающей силы замыкается и производит остановку механизма.
Тормозные электромагниты подразделяются на длинноходовые и короткоходовые. У первых ход якоря составляет 50-80 мм, а у вторых-2-4 мм. Короткоходовые электромагниты устанавливаются преимущественно на тех же рычагах, что и колодки, а длинноходовые связаны с ними специальной рычажной системой.
По потребной работе электромагнит может быть выбран по каталогу.
В процессе работы должен быть обеспечен равномерный отход колодок с обеих сторон и по длине колодки. Для регулировки отхода используются специальные болты, устанавливаемые на фундаменте тормоза под колодочными рычагами и на рычагах под колодками.
Электрогидравлические и электромеханические толкатели также могут быть подобраны по потребной работе.
Электрогидравлический толкатель представляет собой комплекс центробежного насоса, приводимого в действие электродвигателем малой мощности, и поршневой группы, соединенной с рычажной системой тормоза посредством штока (рис. 2). Насос и поршень (а для уменьшения габаритов - и электродвигатель) заключены в единый корпус. Под воздействием крыльчатки рабочая жидкость (преимущественно трансформаторное масло) перемешает поршень, приводя в действие рычажную систему тормоза.

Рис. 2. Колодочный тормоз с электрогидравлическим толкателем: 1 - электрогидравлический толкатель; 2 – затормаживающая пружина; 3 – тормозные колодки; 4 – тормозной шкив.
В электромеханическом толкателе соединений с рычажной системой шток перемешается под воздействием центробежной силы вращающихся масс.
Как те, так и другие толкатели не чувствительны к механическим перегрузкам, ход штока у них может быть ограничен в любую сторону на любую величину. Они обеспечивают плавную работу с большим числом включений в час, позволяют регулировать время срабатывания тормоза и время торможения, относительно просты в эксплуатации.
Ленточные тормоза.
В ленточных тормозах тормозной момент создается за счет трения фрикционного материала, укрепляемого на стальной ленте, огибающей шкив, о поверхность тормозного шкива.
В зависимости от расположения точек крепления концов ленты относительно оси вращения тормозного рычага ленточные тормоза подразделяются на суммирующие, простые и дифференциальные.
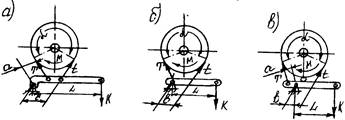
Рис. 3. Ленточные тормоза: а) – суммирующий; б) – простой; в) – дифференциальный.
В суммирующем тормозе (рис. 3. а) оба конца ленты прикреплены к тормозному рычагу с одной стороны от оси вращения его. Плечи закрепления концов ленты могут быть разными, при одинаковых плечах величина тормозного момента не зависит от направления вращения шкива. Применяются они преимущественно в тех механизмах, где требуется постоянство тормозного момента независимо от направления движения механизма (механизм поворота, передвижения).
Толщина стальной ленты определяется ее прочностью в самом опасном сечении при максимальном натяжении ленты. В целях обеспечения равномерной гибкости и прилегания ленты к шкиву по всей окружности толщина ленты более 10 мм не рекомендуется.
При растормаживании отход ленты должен быть обеспечен не менее, чем на 1-5-1,5 мм.
Тормоза с осевым нажатием.
В этих тормозах необходимое для получения тормозного момента усилие действует вдоль оси тормозного вала. К ним относятся дисковые и конические тормоза.
В дисковых тормозах (рис. 4) ряд дисков I фиксируется со скольжением на шпонках в неподвижном корпусе, а второй ряд дисков II получает такую же связь с тормозным валом. При сжатии обеих групп дисков силой К между ними возникает сила трения, создающая тормозной момент.
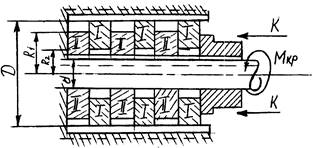
Рис. 4. Дисковый тормоз.
Конический тормоз (рис. 5) состоит из подвижного 2 и неподвижного конусов 1. Осевым усилием К подвижный конус прижимается к неподвижному, в результате чего на образующей конической поверхности сила трения создает тормозной момент.

Рис. 5. Конический тормоз.
Однако, во избежании заклинивания конусов угол Р не рекомендуется принимать меньше 30°.
С учетом функционального назначения все тормоза должны отвечать следующим требованиям: обладать достаточной прочностью и долговечностью; иметь малые габариты и массу; быть простым в изготовлении, иметь свободный доступ для осмотра и ремонта; трущиеся детали должны иметь минимальный износ; температура на поверхности нагрева не должна превышать предельного значения.
Изучение конструкции и основ проектирования механизма подъема
Назначение и разновидности механизма подъема
Механизм подъема предназначен для подъема и опускания груза на необходимую высоту с заданной скоростью и удержания груза на любой, требуемой условиями технологического процесса, высоте.
Подъемный механизм может быть самостоятельным (тельфер, таль) или входить в состав другой перегрузочной установки, например в состав крана.
Механизм подъема включает в себя двигатель, передаточный механизм (редуктор или редуктор и открытую передачу), тормоз, грозовой барабан, блоки, тяговый орган (чаще всего стальной канат) и грузозахватное устройство (крюк, грузовая подвеска, грейфер и т.п.).
Входящие в состав кранов механизмы подъема грузов (грузовые лебедки) в зависимости от рода перегружаемого груза подразделяются на грейферные и крюковые лебедки.
Крюковые подъемные лебедки обычно имеют один электродвигатель, один или два грузовых барабана. При этом барабаны могут вращаться только одновременно и без изменения направления вращения относительно друг друга.
В зависимости от количества этих конструктивных элементов крюковые лебедки называются одномоторными однобарабанными или одномоторными двухбарабанными.
Конструктивное исполнение крюковых лебедок может быть самым различным в зависимости от количества барабанов и передаточных устройств (рис. 1. а, б, в).
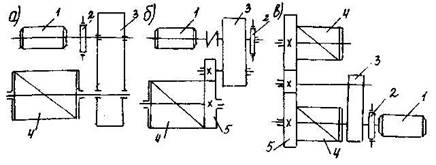
Рис.6. Схемы одномоторных крюковых лебедок:
1 - электродвигатель; 2 - тормоз: 3 - редуктор: 4 - барабан: 5 – открытая передача.
Грейдерные (двухбарабанные) лебедки различают одномоторные и двухмоторные, позволяющие получить различные сочетания вращения барабанов, что необходимо для обеспечения работы грейфера. В грейферных лебедках кранов один барабан является замыкающим, а второй поддерживающим, аналогично и называются лебедки - одна замыкающая, а вторая - поддерживающая.
В процессе работы грейферного крана возможны следующие сочетания вращения барабанов:
- при подъеме и опускании грейфера барабаны обеих лебедок вращаются синхронно;
- при зачерпывании груза грейфером барабан замыкающей лебедки вращается в сторону подъема, барабан поддерживающей лебедки - на опускание, обеспечивая слабину каната по мере заглубления грейфера;
- при раскрытии грейфера барабан замыкающей лебедки вращается на опускание, а барабан поддерживающей заторможен, иногда для более быстрого раскрытия грейфера барабаны лебедок вращают в разные стороны, т.е. замыкающий на спуск, а поддерживающий - на подъем.
Одномоторные грейферные лебедки (рис. 2) имеют один двигатель, обеспечивающий различное сочетание вращения барабанов посредством фрикционных муфт и тормозов. Двигатель жестко связан с замыкающим барабаном, поддерживающий же барабан присоединяется к двигателю посредством управляемой фрикционной или планетарной муфты.
Одномоторные лебедки менее совершенны и более сложны в управлении, в них совмещение таких операций, как подъем-опускание и раскрытие-закрытие грейфера невозможно (рис. 2.а).
Двухмоторные лебедки позволяет избежать этих недостатков, хотя они сложнее и дороже одномоторных лебедок, но повышение оперативности и производительности кранов окупает дополнительные затраты. В настоящее время двухмоторные лебедки являются основным типом грейферных лебедок кранов. Из большого разнообразия двухмоторных лебёдок наибольшее применение имеют лебедки, состоящие из двух нормальных крановых крюковых лебедок с независимыми двигателями (рис. 2. б), а также лебедки с планетарной связью между барабанами.
Главным требованием, предъявляемым к работе двухмоторных лебедок является равномерность распределения нагрузок на канаты и синхронность вращения барабанов с целью обеспечения равной скорости выборки канатов.
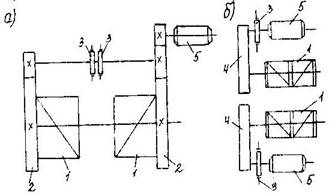
Рис. 7. Схемы грейферных лебёдок:
а – одномоторная; б – двухмоторная:
1 – барабан; 2 – открытая передача; 3 – соединительная муфта с тормозным шкивом; 4 – редуктор; 5 – двигатель.
В зависимости от взаимного расположения двигателя и барабана различают следующие компоновочные схемы лебедок механизма подъёма: П - образную, Z - образную и соосную, которые принимаются с учетом конкретных условий работы и наличия производственных площадей (рис. 3).

Рис. 8. Компоновочные схемы лебедок:
а – «П» - образная; б - "Z"-образная; в - соосная. 1 – барабан; 2 – электродвигатель; 3 – тормоз; 4 - редуктор.
В механизмах подъема применяются нормально замкнутые тормозные устройства с автоматическим управлением.
Исходные данные
Грузоподъёмность ![]() ;
;
Скорость поднимания груза ![]() ;
;
Продолжительность включений ПВ%=32%;
Диаметр барабана ![]() =800 мм;
=800 мм;
1. Расчет электродвигателя
![]() , кВт - статистическая мощность электродвигателя для крюкового режима работы
, кВт - статистическая мощность электродвигателя для крюкового режима работы
![]() - общий к.п.д.
- общий к.п.д.
![]() - к.п.д. полиспаста
- к.п.д. полиспаста
![]() - к.п.д. блока
- к.п.д. блока
![]() - к.п.д. барабана
- к.п.д. барабана
![]() - к.п.д. лебедки
- к.п.д. лебедки
![]() .
.
![]() кВт
кВт
Так как электродвигатели грузоподъемных машин работают в повторно-кратковременном режиме, то производят пересчет мощности для случая, если фактическая (расчетная) относительная продолжительность включения (ПВ%) не совпадает с каталоговой по формуле:
где ПВ%ф = 32 % - фактическая относительная продолжительность включения
ПВ%к = 40 % - каталоговая относительная продолжительность включения
![]() кВт
кВт
По каталогу выбирается электродвигатель из условия:![]() ,
,
где Nк – номинальная мощность электродвигателя (значение по каталогу), кВт;
Nст – статическая мощность электродвигателя, кВт.
Основные параметры электродвигателя:
-Тип двигателя – МТН 713-10;
-Мощность Nдв = 160 кВт;
-Число оборотов nдв = 585 об/мин;
-ПВ% = 40 %;
-Момент инерции Jр = 15 кг·м2;
-Ширина двигателя Вдв = 790 мм.
2. Расчет редуктора
Общее передаточное число механизма:
 ,
,
где ![]() - частота вращения вала электродвигателя, об/мин;
- частота вращения вала электродвигателя, об/мин;
![]() - частота вращения барабана, об/мин.
- частота вращения барабана, об/мин.
![]() ,
,
где Vп – скорость подъема груза, 55 м/мин;
m – кратность полиспаста механизма подъема = 2;
![]() =0,8м – диаметр барабана.
=0,8м – диаметр барабана.
![]() ;
;
![]() об/мин.
об/мин.
По передаточному числу выбирается редуктор, и выписываются его основные параметры. Выбранный редуктор должен удовлетворять следующим условиям (с погрешностью ![]() ):
):

![]() - суммарное межосевое расстояние
- суммарное межосевое расстояние
1000>395+400
Основные параметры редуктора:
- Тип редуктора – РМ1000;
- Передаточное число редуктора iрк = 15,73 об/мин;
- Число об/мин на быстроходном валу nр = 600 об/мин;
- Мощность на быстроходном валу Nр = 168 кВт;
- «П»-образная компановочная схема
3. Расчет тормоза
Тормоз выбирается по необходимому тормозному моменту:
![]() ,Нм
,Нм
где ![]() - рабочий (статический) момент на быстроходном валу редуктора, создаваемый массой неподвижно висящего груза, Н∙м;
- рабочий (статический) момент на быстроходном валу редуктора, создаваемый массой неподвижно висящего груза, Н∙м;
![]() =2,0 коэффициент запаса торможения, зависящий от режима работы
=2,0 коэффициент запаса торможения, зависящий от режима работы
 ,
,
тормозной подъемный устройство
где Gн – грузоподъемная сила крана, Н;
![]() – диаметр барабана, м;
– диаметр барабана, м;
iр – передаточное число редуктора;
![]() - общий к.п.д. механизма подъема;
- общий к.п.д. механизма подъема;
m – кратность полиспаста.

![]() Нм.
Нм.
По величине тормозного момента выбирается тормоз, при этом необходимо чтобы ![]() :
:
Основные параметры тормоза:
- Тип тормоза – ТКТГ-600М;
- Диаметр тормозного шкива Dшк = 600 мм;
- Тормозной момент Мт = 5000 Н·м;
- Отход колодок = 1,8 мм;
- Тип толкателя - ТГМ-80;
- Усилие толкателя = 800 Н;
- Ход толкателя = 50 мм.
4. Расчет муфты
Муфта выбирается по каталогу исходя из крутящего момента:
![]() ,Нм
,Нм
где к1 – коэффициент, учитывающий степень ответственности механизмов, к1=1,3;
к2 - коэффициент, зависящий от режима работы, к2=1,3;
Мр – рабочий момент на быстроходном валу редуктора


![]() Нм
Нм
Основные параметры муфты:
- Втулочно-пальцевая муфта;
- Диаметр тормозного шкива Dшк = 600 мм;
- Число пальцев – 8;
- Момент инерции Jм = 28,6 кг∙м2;
- Наибольший передаваемый момент Мкр = 8000 Н
- Размер ступицы:
l=150мм dк =89,5мм
lк=135мм L=245мм
d=70мм
Похожие рефераты:
Тормозные механизмы автомобиля КамАЗ: ремонт и техническое обслуживание
Ремонт и техническое обслуживание тормозных систем легкового автомобиля
Тормозная система с пневматическим приводом
Расчет поворотного крана на неподвижной колонне
Технология ремонта рабочей тормозной системы ГАЗ-3307
Разработка мероприятий по совершенствованию технологии ремонта стиральных машин барабанного типа
Основы технической диагностики автомобилей
Техническая характеристика, устройство и работа тормозной системы автомобиля ВАЗ-2106
Расчет конвейерной установки в условиях ш. Воркутинская
Мероприятия по совершенствованию технической базы школы подготовки водителей
Разработка логической схемы управления двустворчатых ворот судоходного шлюза