| Похожие рефераты | Скачать .docx |
Курсовая работа: Расчет трехфазного асинхронного двигателя с короткозамкнутым ротором на мощность 45 киловатт
СОДЕРЖАНИЕ
АННОТАЦИЯ
ВВЕДЕНИЕ
1 АНАЛИТИЧЕСКИЙ ОБЗОР
1.1 Современные серии электрических машин
1.2 Основные тенденции в электромашиностроении
2 РАСЧЕТЫ И ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ
2.1 Техническое задание
2.2 Выбор аналога двигателя
2.3 Размеры, конфигурация и материал магнитной цепи двигателя
2.4 Обмотка статора
2.5 Обмотка короткозамкнутого ротора
2.6 Расчет магнитной цепи
2.7 Активные и индуктивные сопротивления обмоток
2.8 Режим холостого хода и номинальный
2.9 Рабочие характеристики
2.10 Максимальный момент
2.11 Начальный пусковой момент и пусковые токи
2.12 Расчет механической характеристики двигателя и зависимости пускового тока от скольжения
2.13 Тепловой и вентиляционный расчеты
2.14 Масса двигателя и динамический момент инерции ротора
2.15 Расчет надежности обмотки статора
2.16 Механический расчет вала и подбор подшипников качения
ЗАКЛЮЧЕНИЕ
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
ПРИЛОЖЕНИЕ
АННОТАЦИЯ
Темников Ю.В. Двигатель асинхронный трехфазный, мощность 45 кВт, 6 полюсов.
Страниц: 48
Иллюстраций: 7
Приложений: 4
Таблиц: 2
Представлены результаты расчета трехфазного асинхронного двигателя с короткозамкнутым ротором на мощность 45 киловатт, число полюсов равно 6, линейное напряжение сети: при соединении в треугольник – 380В, при соединении в звезду – 660В, частота питающей сети 50 Гц.
Спроектирован асинхронный электродвигатель с короткозамкнутым ротором. Высота оси вращения – 250мм, магнитопроводы статора и ротора выполнены из стальной ленты, марка стали – 2411, обмоточный провод ПЭТ-155, обмотка ротора из алюминия марки АКМ12-4, станина литая из чугуна, класс нагревостойкости изоляции F.
Расчеты выполнены с учетом рекомендаций, изложенных в учебных пособиях Гольдберга О.Д. «Проектирование электрических машин»[1] и Гурина Я.С. «Проектирования серий электрических машин» [2].
ВВЕДЕНИЕ
Асинхронный электродвигатель - двухобмоточный электрический двигатель, одна из обмоток которого питается от сети переменного напряжения, а другая замкнута накоротко или на сопротивление.
Асинхронные двигатели находят широкое применение в хозяйстве. По разным данным, около 70% всей электрической энергии, преобразуемой в механическую вращательного или поступательного движения, потребляется асинхронными электродвигателями.
Широкое применение асинхронных двигателей связано с простотой их конструкции, ее технологичностью и минимальными затратами в эксплуатации, по сравнению с другими видами электрических машин, таких как двигатели постоянного тока, синхронными двигателями и т.д.
Трехфазный асинхронный электродвигатель, традиционного исполнения, выполняющего вращательное движение (конструкция такого двигателя впервые была предложена М.О. Доливо-Добровольским в 1889 году) состоит из двух основных частей: неподвижного статора и вращающегося ротора.
Статор состоит из станины, в которую впрессован сердечник статора – магнитопровод статора с распределенной обмоткой. Назначение сердечника – создание вращающегося магнитного поля. Магнитопровод состоит из штампованных, изолированных друг от друга листов электротехнической изотропной (в крупных машинах – анизотропной) стали, толщиной (в зависимости от размеров и необходимых параметров машины) от 0,28 до 1мм.
Сердечник ротора двигателя, аналогично сердечнику статора, набирается из листов электротехнической стали. Обмотки роторов бывают короткозамкнутые, из алюминиевого литья, и фазные, которые, аналогично обмотке статора, выполнены из изолированного медного провода, концы обмоток выводятся на контактные кольца, закрепленные на вале ротора, далее, посредством щеточного контакта, к обмотке ротора можно подключить пусковой реостат.
В данном курсовом проекте речь пойдет о трехфазном асинхронном двигателе с короткозамкнутым ротором.
1. АНАЛИТИЧЕСКИЙ ОБЗОР
1.1 Современные серии электрических машин
В 70-е годы была разработана и внедрена серия электродвигателей 4А, основным критерием при проектировании которой был принят минимум суммарной стоимости двигателя в производстве и эксплуатации. Переход на новую привязку мощностей и установочных размеров электродвигателей позволил получить большую экономию дефицитных материалов. Впоследствии серия была модернизирована, вследствие чего несколько улучшены виброакустические и некоторые энергетические показатели электрических двигателей. Серия получила название 4АМ.
В связи со все возраставшими требованиями мирового электромашиностроения к асинхронным двигателям на замену двум предыдущим сериям 4А и 4АМ в 80-х годах бывшей организацией социалистических стран ИНТЕРЭЛЕКТРО была разработана унифицированная серия асинхронных электродвигателей АИ. Двигатели серии АИ отличаются повышенными надежностью и перегрузочной способностью – расширенным диапазоном регулирования, улучшенными энергетическими и виброакустическими характеристиками.
Распад Советского Союза на суверенные государства привел к тому, что многие заводы электротехнической промышленности, монопольно выпускавшие отдельные габариты единой серии АИ, оказались за рубежом. Поэтому в НИПТИЭМ разработана новая серия асинхронных электродвигателей 5А (взаимозаменяемых с электродвигателями АИР, 4А) на замену тем габаритам, производство которых осталось за границей России.
При разработке серии 5А учтены изменившиеся требования к асинхронным электродвигателям для повышения конкурентоспособности их на мировом рынке. На многих типоразмерах двигателей улучшены энергетические, виброакустические показатели, а так же моментные характеристики.
Общая характеристика двигателей серии АИ и5А
Привязка мощностей и установочных размеров электрических двигателей серии АИ аналогична привязке серий 4А, 4AМ и охватывает диапазон 0,06…400 кВт (при частоте вращения 1500 оборотов в минуту). Серия состоит из 17 габаритов, характеризуемых значениями оси вращения от 50 до 355 мм. Двигатели выпускается на частоты вращения 3000, 1500, 1000, 750, 600 и 500 оборотов в минуту.
Структура серии предусматривает следующие группы исполнений:
· основное;
· модификации по характеристикам с повышенным пусковым моментом,электрические двигатели с повышенным скольжением, многоскоростные двигатели, электрические двигатели с фазным ротором, однофазные, малошумные;
· модификации по условиям окружающей среды (для холодного, длятропического климата, электродвигатели для сельского хозяйства, для работы в пыльных помещениях, для работы в химически активных средах);
· модификации электродвигателей по точности установочных размеров (сповышенной точностью, с высокой точностью установочных размеров);
· модификации асинхронных двигателей с дополнительнымиустройствами (со встроенной температурной защитой, со встроенным электромагнитным тормозом);
· узкоспециализированные модификации (текстильные, длямоноблокнасосов, двигатели в рудничном нормальном исполнении).
В России двигатели серии 5АМ (модернизированные) производят на Владимирском Электромашиностроительном Заводе. В настоящее время завод выпускает и двигатели серии 6А. Ведутся разработки серии 7А.
Параллельно в 1992 году на Ярославском Электромашиностроительном Заводе шло создание новой серии электрических машин РА. В двигателях используются съемные лапы, позволяющие потребителю выбирать наиболее удобное для него расположение машины. Кроме того, в двигателях используется горизонтально-вертикальноеоребрение станин, позволяющее сэкономить до 15% материала станины, улучшая при этом теплоотдачу. Освоение серии РА позволило сократить зависимость России от импорта и развить экспорт асинхронных двигателей.
1.1. Основные тенденции в развитии электромашиностроения.
К основным тенденциям можно отнести:
· Применение утоньшенной корпусной изоляции и обмоточных проводов с малой толщиной изоляции. При этом повышается коэффициент заполнения обмоточного пространства медью и соответственно использование объема машины.
· Использование более нагревостойкой изоляции. В настоящее время наибольшее распространение находит изоляция класса F. В машинах, работающий в более тяжелых условиях, распространена изоляция класса Н.
· Применение улучшенных марок электротехнической стали. Сейчас часто используют холоднокатаную электротехническую сталь, обладающую большей магнитной проницаемостью и меньшими удельными потерями в сравнении с горячекатаной.
· Усовершенствование охлаждения машин, путем повышения производительности вентиляторов, уменьшения аэродинамического сопротивления воздухопровода, увеличения поверхности охлаждения, усиления теплопередачи путем лучшего заполнения воздушных прослоек в обмотках пропитывающими лаками и компаундами.
· Усовершенствование методов расчета машин.
· Улучшение конструкции машин, придание рациональной формы, при обеспечении снижения массы и повышения прочности.
Также сюда можно отнести стремление уменьшить динамический момент инерции, увеличение отношения длины сердечника ротора к его диаметру; повышение надежности.
2. Расчеты и основные результаты работы
2.1 Техническое задание
Спроектировать трехфазный асинхронный электродвигатель в соответствии со следующими данными:
номинальная мощность P2 =45 кВт;
номинальное линейное напряжение, Δ/Y: 380/660 В;
число пар полюсов р=3;
степень защиты: IP44;
исполнение по способу монтажа: IM1001;
исполнение по способу охлаждения: IC141.
2.2 Выбор аналога двигателя
По вышеуказанным данным выбираем из каталога Владимирского Электромашиностроительного Завода двигатель 5АМ250S6У3.
Технические характеристики двигателя:
номинальная мощность: P2 =45 кВт;
номинальное линейное напряжение: 380/660В (Δ/Y);
номинальная частота вращения: nном =985 об/мин;
коэффициент полезного действия: η=93%;
коэффициент мощности: cosφ=0.83;
номинальный фазный ток: I1ном = 87.5А;
номинальный момент: Мном =436 Н·м;
кратность пускового момента к номинальному: Мп /Мном =2;
кратность максимально момента к номинальному: Мm /Мном =2;
динамический момент инерции ротора: J=1.2 Н·м2 ;
масса двигателя: 430 кг.
2.3 Размеры, конфигурация, материал магнитной цепи двигателя
По таблице 9-2 [1] по заданной высоте оси вращения определяем максимально допустимый наружный диаметр сердечника статора:
DH 1 max =452 мм, припуск на штамповку – Δшт = 8мм; ширина резаной ленты стали марки 2411 равна 460мм.
Выбираем наружный диаметр сердечника статора: DH 1 =440мм.
Внутренний диаметр сердечника статоранаходим по формуле, приведенной в таблице 9-3 [1]:
|
|
мм;
Расчетную мощность Р1 по коэффициенту kH =0.97 находим по формуле 1.11[1], cosφпринимаем 0.86:
![]()
Для изготовления магнитопроводов статора и ротора выбираем резаную ленту стали 2411, толщиной 0.5 мм.
По графикам на рисунке 9-4 [1] определим электромагнитные нагрузки:
А1 =358 А/см – линейная нагрузка статора;
Вδ ’ =0.81 Тл – индукция в зазоре.
Частота вращения ротора при идеальном холостом ходе n=1000 об/мин.
Предварительный коэффициент обмотки статора: kоб1 =0.93.
Определим приблизительную длину сердечника статора:

Принимаем длину сердечника равной 175 мм. Найдем отношение длины к диаметру сердечника и сравним с максимально допустимым:
![]()
![]()
Полученное отношение меньше предельного, с учетом достаточно большого числа полюсов – длина сердечника достаточна.
Сердечник статора из стали 2411 с термостойким изоляционным покрытием. Коэффициент заполнения сталью: kc =0.93.
Число пазов на полюс и фазу q1 выбираем равным 4.
Количество пазов, таким образом: z1 =6·3/4=72, пазы трапецеидальные полузакрытые, обмотка всыпная из круглого провода.
Сердечник ротора из стали 2411 с термостойким изоляционным покрытием. Коэффициент заполнения также 0.93.
Наружный диаметр ротора определяем по формуле, с учетом что зазор в машине принимаем равным 0.7мм:
![]()
Внутренний диаметр листов ротора:
![]()
Для улучшения охлаждения машины и уменьшения динамического момента инерции делаем nk = 10 аксиальных каналов в сердечнике ротора, диаметром dk =30мм.
Длина сердечника ротора равна l, длине сердечника статора.
Число зубцов ротора, в соответствии с предложенным рядом, выбираем равным z2 =82.
2.4 Обмотка статора
Обмотка всыпная из круглого провода марки ПЭТ-155, класса F, двухслойная, с укороченным шагом, петлевая (схема обмотки фазы в Приложении).
Коэффициент распределения обмотки:

где α=60° /q1 =15°.
Шаг обмотки (коэффициент укорочения β принимаем равным 0.833:
![]()
Коэффициент укорочения:
![]()
Обмоточный коэффициент (скоса пазов нет, коэффициент скоса равен единице):
![]()
Предварительное значение магнитного потока:
![]()
Предварительное число витков в обмотке фазы:
![]()
Число эффективных проводников в пазу (число параллельных ветвей в обмотке а=1):
![]()
Принимаем Nп =10, тогда число витков в фазе ω=120.
Уточним значения магнитного потока и индукции в воздушном зазоре:
![]()
![]()
Предварительное значение номинального фазного тока:
![]()
Уточненная линейная нагрузка статора:
![]()
Разница с ранее принятым ![]() .
.
Расчет трапецеидального полузакрытого паза:

Рис.1. Трапецеидальный полузакрытый паз статора
Зубцовое деление по внутреннему диаметру статора:
![]()
Из рекомендуемых значений индукции в зубце статора (таблица 9-14 [1]) принимаем индукцию в зубце: Bз1 =1.7 Тл.
Определим ширину зубца:
![]()
Индукцию в спинке статора определяем по таблице 9-13 [1]: Вс1 =1.45 Тл.
Высота спинки статора:
![]()
Высота паза:
![]()
Большая ширина паза:
![]()
Высота шлица: hш1 =0.5 мм; ширина шлица bш1 =0.3h1/2 =4.5мм.
Меньшая ширина паза:

Высота паза занимаемая обмоткой:
![]()
Размеры hk , h2 , h4 определяем в соответствии с таблицей 9-21[1].
Выполним проверку правильности определения большей и меньшей ширины паза:
![]()
Следует, что расчет геометрии произведен верно.
Припуск на сборку: bc =0.2 и hc =0.2мм.
Площадь поперечного сечения паза в штампе:

Площадь поперечного сечения паза в свете:

Толщина корпусной изоляции: bи1 =0.4 мм.
Определим площадь поперечного сечения корпусной изоляции:
![]() мм2
мм2
Площадь поперечного сечения прокладок между верхней и нижней катушками в пазу на дне паза и под клином:
![]()
Площадь поперечного сечения занимаемая обмоткой:
![]()
Число элементарных проводников в эффективном с=6.
Тогда диаметр элементарного изолированного провода, при предположении что коэффициент заполнения паза kn =0.72:

По приложению 1[1] находим ближайший стандартный провод марки ПЭТ-155:
d1 =1.585 мм; сечение провода (неизолир.) S=1.767мм2 .
Предварительное значение плотности тока в обмотке:

Коэффициент заполнения паза:
![]()
Определим размеры элементов обмотки:
Среднее зубцовое деление статора:
![]()
Средняя ширина катушки обмотки:
![]()
Средняя длина одной лобовой части катушки:
![]()
Средняя длина витка обмотки:
![]()
Длина вылета лобовой части:
![]()
2.5 Обмотка короткозамкнутого ротора
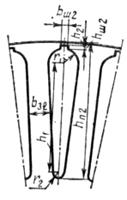
Рис.2. Закрытый грушевидный паз
Выбираем по таблице 9-18 индукцию в зубце ротора:
B32 =1.8 Тл.
Выбираем глубину паза по рисунку 9-12 [1]:
hn 2 =56мм.
Высота спинки ротора:
![]()
Индукция в спинке ротора:
![]()
Зубцовое деление по наружному диаметру ротора:
![]()
Ширина зубца ротора:
![]()
Меньший радиус паза:
![]()
Высота шлица: hш2 =0.7 мм; высота мостика h2 =0.3 мм; ширина мостика bш2 =1.5мм.
Больший радиус паза:

![]()
Проверка правильности определения r1 и r2 :
![]()
Сечение стержня:
![]()
Обмотка ротора из алюминия марки АКМ12-4. Вместе с обмоткой отливаем короткозамыкающие кольца и вентиляционные лопатки.

Рис.3. Короткозамыкающее кольцо и вентиляционная лопатка ротора.
Поперечное сечение кольца:
![]()
Высота кольца:
![]()
Длина кольца:
![]()
Средний диаметр кольца:
![]()

Рис.4. Вентиляционные лопатки ротора
Вылет лобовой части обмотки ротора по рисунку 9-21 [2]:
lл = 70мм. На роторе 14 лопаток, толщиной 4мм.
2.6 Расчет магнитной цепи.
МДС для воздушного зазора.
Коэффициент, учитывающий увеличение магнитного сопротивления воздушного зазора вследствие зубчатого строения статора:

Коэффициент, учитывающий увеличение магнитного сопротивления воздушного зазора вследствие зубчатого строения ротора:

Коэффициент воздушного зазора:
![]()
МДС воздушного зазора:
![]()
МДС для зубцов при трапецеидальных полузакрытых пазах статора:
B31 =1.7 Тл;
Н31 =16.3 А/см (для стали 2411);
L31 =hп1 =32.7мм – средняя длина пути магнитного потока;
![]()
МДС для зубцов при грушевидных закрытых пазах ротора:
B32 =1.8Тл;
Н32 =31.9 А/см;
L32 =hп2 -0.2r2 =56-0.2=55.8мм;
![]()
МДС для спинки статора:
Bс1 =1.45Тл;
Нс1 =5.7 А/см;
![]()
![]()
МДС для спинки статора:
Bс2 =1.03Тл;
Нс2 =2.77 А/см;

![]()
Параметры магнитной цепи:
СуммарнаяМДС на один полюс:
![]()
Коэффициент насыщения магнитной цепи:
![]()
Намагничивающий ток:
![]()
Намагничивающий ток в относительных единицах:
![]()
ЭДС холостого хода:
![]()
Главное индуктивное сопротивление:
![]()
Главное индуктивное сопротивление в относительных единицах:
![]()
2.7 Активные и индуктивные сопротивления обмоток
Активное сопротивление обмотки фазы при 20°С:
![]()
В относительных единицах:
![]()
Проверка правильности определения:
![]()
Коэффициенты, учитывающие укорочение шага обмотки (по рисунку 14-18[2]):
kβ 1 =0.7;
k’β 1 =0.77;
Коэффициент проводимости для пазового рассеяния:

Коэффициент, учитывающий влияние открытия пазов статора на проводимость дифференциального рассеяния:

Коэффициент , учитывающий демпфирующую реакцию токов, наведенных в обмотке короткозамкнутого ротора высшими гармониками поля статора, по таблице 9-22 [1]:
k’p 1 =0.74
Коэффициент дифференциального рассеяния статора:
kд1 =0.0062
Коэффициент проводимости для дифференциального рассеяния:

Полюсное деление:
![]()
Коэффициент проводимости рассеяния лобовых частей:
![]()
Коэффициент проводимости рассеяния обмотки статора:
![]()
Индуктивное сопротивление обмотки фазы статора:

То же в относительных единицах:
![]()
Проверка правильности определения:

Сопротивление обмотки короткозамкнутого ротора с овальными закрытыми пазами:
Активное сопротивление стержня клетки при 20°С:
![]()
Где 15 См/мкм – удельная проводимость алюминия АКМ12-4.
Коэффициент приведения тока кольца к току стержня:
![]()
Активное сопротивление короткозамыкающего кольца:

Коэффициент приведения сопротивления обмотки ротора к обмотке статора:
![]()
Активное сопротивление обмотки ротора, приведенное к обмотке статора:
![]()
Активное сопротивление обмотки ротора, приведенное к обмотке статора в относительных единицах:
![]()
Ток стержня ротора для рабочего режима:

Коэффициент проводимости рассеяния:

Количество пазов ротора на полюс и фазу:
![]()
Из рисунка 9-17 [1]:
Коэффициент дифференциального рассеяния: kд2 =0.0045
![]()
Коэффициент проводимости рассеяния короткозамыкающих колец:

Коэффициент проводимости рассеяния:
![]()
Индуктивное сопротивление обмотки ротора:
![]()
Приведенное:
![]()
В относительных единицах:
![]()
Проверка правильности определения:
x1 /x’2 =0.7 (находится в рекомендуемых пределах 0.7-1.0).
Сопротивления обмоток преобразованной схемы замещения двигателя (с вынесенным на зажимы намагничивающим контуром):
Коэффициент рассеяния статора:
![]()
Коэффициент сопротивления статора:
![]()
Параметры схемы замещения:
![]()
![]()
![]()
![]()
ЭДС холостого хода:

Разница с ранее рассчитанным:
![]()
2.8 Режим холостого хода и номинальный
Реактивная составляющая тока статора при синхронном вращении:
|
|
 А
АЭлектрические потери в обмотке статора при синхронном вращении:
|
|
Расчетная масса стали зубцов статора при трапецеидальных пазах:
|
|
Магнитные потери в зубцах статора:
|
|
Масса стали спинки статора:
|
|
Магнитные потери в спинке статора:
|
|
Суммарные магнитные потери в сердечнике статора, включающие добавочные потери в стали:
|
|
 Вт
ВтМеханические потери:
|
|
 Вт
ВтАктивная составляющая тока холостого хода:
|
|
 А
АТок холостого хода:
|
|
Коэффициент мощности при холостом ходе:
|
|

Расчет номинального режима производим в соответствии со схемой замещения, представленной на рисунке 5.

Рис.5. схема замещения асинхронного двигателя.
Расчет параметров схемы замещения.
Активное сопротивление короткого замыкания:
|
|
Индуктивное сопротивление короткого замыкания:
|
|
Полное сопротивление короткого замыкания:
|
|
Добавочные потери при номинальной нагрузке:
|
|
 Вт
ВтМеханическая мощность двигателя:
|
|
Эквивалентное сопротивление схемы замещения:
|
|
 Ом
ОмПолное сопротивление схемы замещения:
|
|
Проверка правильности расчетов:
|
|

|
|

Номинальное скольжение:
|
|

Активная составляющая тока статора при синхронном вращении:
|
|
 А
АТок ротора:
|
|
 А
ААктивная составляющая тока статора:
|
|
 А
АРеактивная составляющая:
|
|
 А
АФазный ток статора:
|
|
Коэффициент мощности:
|
|

Линейная нагрузка статора:
|
|
 А/см
А/смПлотность тока в обмотке статора:
|
|
 А/мм2
А/мм2
Линейная нагрузка ротора:
|
|
 А/см
А/смТок в стержне короткозамкнутого ротора:
|
|
 А
А|
|
 А/мм2
А/мм2
Плотность тока в стержне короткозамкнутого ротора:
Ток в короткозамыкающем кольце:
|
|
 А
АЭлектрические потери в обмотке статора:
|
|
Электрические потери в обмотке ротора:
|
|
Суммарные потери в электродвигателе (Вт):
|
|
Подводимая мощность:
|
|
Коэффициент полезного действия
:
|
|
 %
%Проверка.
Подводимая мощность:
|
|
Выходная мощность:
|
|
 Вт
ВтПри повышении точности расчета (до 4-6 знаков после запятой) выходная мощность стремится к значению 45000Вт.
2.9 Рабочие характеристики.
Расчет рабочих характеристик ведем аналитическим путем по формулам из предыдущего пункта, меняя мощность Р2 в диапазоне от 0 до 58.8 кВт. Полученные графики смотрите в Приложении.
2.10 Максимальный момент.
Переменная часть коэффициента статора при трапецеидальном полузакрытом пазе:
|
|

Составляющая коэффициента проводимости рассеяния статора, зависящая от насыщения:
|
|
Переменная часть коэффициента ротора:
|
|

Составляющая коэффициента проводимости рассеяния ротора, зависящая от насыщения:
|
|
Индуктивное сопротивление рассеяния двигателя, зависящее от насыщения:
|
|
 Ом
ОмНезависящее от насыщения (Ом):
|
|

Ток ротора, соответствующий максимальному моменту, при закрытых овальных пазах:

Полное сопротивление схемы замещения:
|
|
 Ом
Ом –
–
сопротивление при бесконечном скольжении.
Эквивалентное сопротивление схемы замещения при максимальном моменте:
|
|
Кратность максимального момента:
|
|

Критическое скольжение:
|
|

2.11 Начальный пусковой момент и пусковые токи
Рассчитаем параметры схемы замещения двигателя при пуске, с учетом влияния вытеснения тока и насыщения магнитной цепи.
Высота стержня клетки ротора:
![]()
Приведенная высота стержня ротора:

По графику на рисунке 9-23 [1] определяем коэффициент ![]() .
.
Расчетная глубина проникновения тока в стержень:
![]()
Ширина стержня на расчетной глубине проникновения тока:

Площадь поперечного сечения стержня при расчетной глубине проникновения тока:

Коэффициент вытеснения тока:
![]()
Активное сопротивление стержня клетки для пускового режима:
![]()
Активное сопротивление обмоткиротора приведенное к обмотке статора:
![]()
По графику на рисунке 9-23 [1] определяем коэффициент ![]() .
.
Коэффициент проводимости рассеяния паза ротора при пуске:


Коэффициент проводимости рассеяния обмотки ротора при пуске:
![]()
Индуктивное сопротивление рассеяния двигателя, зависящее от насыщения:
![]()
Независящее:

Активное сопротивление короткого замыкания при пуске:

Рассчитаем пусковой ток и момент.
Ток ротора при пуске:

Полное сопротивление схемы замещения при пуске (с учетом эффекта вытеснения тока и насыщения путей потоков рассеяния):
![]()
Индуктивное сопротивление схемы замещения при пуске:
![]()
Активная составляющая тока статора при пуске:


Реактивная составляющая тока статора при пуске:


Фазный ток статора при пуске:
![]()
Кратность начального пускового тока:
![]()
Активное сопротивление ротора при пуске, приведенное к статору, при расчетной рабочей температуре и Г-образной схеме замещения:
![]()
Кратность начального пускового момента:
![]()
2.12 Расчет механической характеристики двигателя и зависимости пускового тока от скольжения
Расчет механической характеристики в диапазоне скольжений от 0 до критического производим по формуле Клосса. Имея значения максимального и пускового моментов и значение момента при s=0.5, можно достаточно точно построить механическую характеристику в диапазоне скольжений от 0 до 1.
Для того, чтобы определить значение момента при s=0.5 построим круговую диаграмму двигателя для данного скольжения, учитывая соответствующее уменьшение индуктивных сопротивлений (в отличии от номинального режима) и увеличения сопротивления r211 . Построение диаграммы ведем по методу, изложенному в параграфе 14-12 [2].
Масштаб по току принимаем: СТ =1.5 А/мм;
Тогда масштаб мощности:
![]()
Диаметр рабочего круга:
![]()
Расстояния GH, GF, GE соответственно:
200·ρ1=2.22мм
100r11 /xk =23.5/1.46=16.1 мм
100rкп /xk = 0.58/1.46=39.7мм
Проводим через точкуО и Е, О и А линии механических мощностей и электромагнитных моментов, соответственно.
Отношение моментов будет равно отношению КК1 /LL1 .
Отношение токов: O1 K/O1 L.

Рис.6. Круговая диаграмма двигателя при s=0.5
Таким образом, кратность моментов равна 1.6.
Кривую тока строим по 4 точкам:
s=0: Ixp /I1 =0.36;
s=0.023: I/I1 =1.0;
s=0.5: I/I1 =4.7 (покруговойдиаграмме);
s=1.0: Ixp /I1 =5.3;
Графики механической характеристики двигателя и зависимости тока от скольжения приведены в Приложении.
2.13 Тепловой и вентиляционный расчеты
Проектируемый двигатель имеет изоляцию класса F. Тепловой расчет проводят для наиболее неблагоприятных условий работы – температуру обмоток принимаем 140 градусов. Соответственно коэффициент mT =1.48.
Потери в обмотке статора при максимальной температуре:
![]()
Условная внутренняя поверхность охлаждения активной части статора:
![]()
Условный периметр поперечного сечения трапецеидального полузакрытого паза:
![]()
Условная поверхность охлаждения пазов:
![]()
Условная поверхность охлаждения лобовых частей:
![]()
Число ребер на станине 36, высота ребра 30мм.
Условная поверхность охлаждения двигателя:
![]()
Удельный тепловой поток от потерь в активной части обмотки и от потерь в стали, отнесенных к внутренней поверхности охлаждения активной части статора:

Удельный тепловой поток от потерь в активной части обмотки, отнесенных к внутренней поверхности охлаждения пазов:

Удельный тепловой поток от потерь в лобовых частях обмотки, отнесенных к внутренней поверхности охлаждения пазов:

Окружная скорость ротора:
![]()
Превышение температуры внутренней поверхности активной части статора над температурой воздуха внутри машины:
![]() (по рисунку 9-24)
(по рисунку 9-24)
Перепад температуры в изоляции паза и катушек из круглых проводов:

Превышение температуры наружной поверхности лобовых частей обмотки над температурой воздуха внутри двигателя:
![]()
Перепад температуры в изоляции лобовых частей катушек из круглых проводов:
![]()
Среднее превышение температуры обмотки над температурой воздуха внутри двигателя:

Потери в обмотке ротора, при максимальной допускаемой температуре:
![]()
Потери в двигателе со степенью защиты IP44, передаваемые воздуху внутри двигателя:

Среднее превышение температуры воздуха внутри двигателя над температурой наружного воздуха:
![]() ( по рисунку 9-25).
( по рисунку 9-25).
Среднее превышение температуры обмотки над температурой наружного воздуха:
![]() .
.
Вентиляционный расчет двигателя.
Наружный диаметр корпуса машины:
![]()
Коэффициент, учитывающий изменение теплоотдачи по длине корпуса двигателя:
|
|

Необходимый расход воздуха:
|
|
 м3
/с
м3
/с
Расход воздуха, который может быть обеспечен наружным вентилятором:
|
|
 м3
/с
м3
/сНапор воздуха, развиваемый наружным вентилятором:
|
|
 Па
Па2.14 Масса двигателя и динамический момент инерции ротора
Масса изолированных проводов обмотки статора:

Масса алюминия короткозамкнутого ротора с литой клеткой (число лопаток на роторе N=14, ширина лопатки средняя bл =5мм, длина лопатки lл =70мм, высота hл =56мм):

Масса стали сердечников статора и ротора:

Масса изоляции статора:
![]()
![]()
Масса конструкционных материалов:
![]()
![]()
Масса двигателя:
![]()
Динамический момент инерции:
![]()
2.15 Расчет надежности обмотки статора
Пусть вероятность наличия хотя бы одного дефекта изоляции провода длиной 100мм после укладки: q1 =0.2, коэффициент характеризующий качество пропитки: kпр =0.5, тогда дефектность витковой изоляции до начала эксплуатации электродвигателя:

Вероятность плотного касания соседних витков:
![]()
Количество проводников, находящихся в наружном слое секции:
![]()
во внутреннем слое:
![]()
![]()
Доля пар соседних элементарных витков, принадлежащих к одному эффективному:

Общая длина пар соседних витков в обмотке:
![]()
Количество последовательно соединенных секций в фазе:
![]()
Среднее значение фазных коммутационных перенапряжений:
![]()
Среднее квадратичное отклонение величины коммутационных фазных перенапряжений:
![]()
Номинальное фазное напряжение, приходящееся на секцию:
![]()
Вероятность отказа витковой изоляции при воздействии одного импульса перенапряжения и при условии, что на касающихся витках имеются совпадающие дефекты:

Скорость роста дефектности витковой изоляции для класса F:
![]()
Вероятность возникновения короткого замыкания витковой изоляции на длине касающихся витков в течение 20000 часов:

Вероятность отказа межвитковой изоляции в течение 20000 часов:
![]()
Вероятность безотказной работы межвитковой изоляции в течение 20000 часов:
![]()
Вероятность безотказной работы обмотки статора за 20000 часов:
![]()
ГОСТ 19523-74 устанавливает минимальную вероятность безотказной работы в течении 10000 часов 0.9. В нашем случае имеем 0.972 при времени работы 20000 часов.
2.16 Механический расчет вала и подбор подшипников качения.

Рис.7. Эскиз вала ротора.
Таблица 1 - Участок вала b:
| d, мм |
J, мм4 |
у, мм |
у3 , мм3 |
y3 i -y3 i-1 , мм3 |
y3 i -y3 i-1 / J, мм-1 |
У2 , мм2 |
y2 i -y2 i-1 , мм2 |
Y2 i -y2 i-1 / J, мм- 2 |
| 80 |
2.01х106 |
13 |
2197 |
2197 |
0.0011 |
169 |
169 |
0.0001 |
| 90 |
3.22х106 |
81.1 |
533411 |
531214 |
0.1649 |
6577 |
6308 |
0.002 |
| 101.2 |
5.15х106 |
250.5 |
15718937 |
15182526 |
2.9494 |
62750 |
56173 |
0.0109 |
Из таблицы (суммы 6ого и 9ого столбцов):
Sb =3.1155
S0 =0.013
Таблица 2 - Участок вала a:
| d, мм |
J, мм4 |
х, мм |
х3 , мм3 |
х3 i -х3 i-1 , мм3 |
х3 i -х3 i-1 / J, мм-1 |
| 80 |
2.01х106 |
13 |
2197 |
2197 |
0.0011 |
| 90 |
3.22х106 |
91.1 |
756058 |
753861 |
0.2341 |
| 101.2 |
5.15х106 |
260.5 |
17677595 |
16921537 |
3.2866 |
Сумма 6ого столбца таблицы 2:
Sа =3.5218
Размеры участков:
![]()
![]()
![]()
![]()
Прогиб вала посередине сердечника под воздействием силы тяжести:
![]()
Прогиб:

Номинальный момент двигателя:
![]()
Поперечная сила передачи (муфта МУВП1-75):
![]()
Прогиб вала посередине сердечника от поперечной силы передачи:

Начальный расчетный эксцентриситет:
![]()
Сила одностороннего магнитного притяжения:
![]()
Дополнительный прогиб вала от силы магнитного притяжения:
![]()
Установившийся прогиб вала от силы магнитного притяжения:

Результирующий прогиб вала:
![]() –
–
составляет менее 10% от зазора.
С учетом влияния силы тяжести соединительного устройства первая критическая частота вращения вала:
![]() - масса муфты;
- масса муфты;
![]() - сила тяжести муфты.
- сила тяжести муфты.

Значительно превышает максимальную рабочую частоту вращения.
Расчет вала на прочность.
При соединении муфтой расстояние от середины втулки муфты до первой ступени вала:
![]()
Момент кручения:
![]()
Изгибающий момент на выходной части вала:
![]()
Момент сопротивления при изгибе:
![]()
При совместном действии изгиба и кручения приведенное напряжение:
![]()
Полученное значение более чем на порядок отличается от критического (материал вала сталь 45, однако можно принять менее прочный материал, например сталь 30).
Подбор подшипников качения.
По рекомендациям данным в пособии «Проектирование серий электрических машин» Гурина Я.С., на выходном конце вала устанавливаем роликовый подшипник, на участке а – шариковый.
Наибольшая радиальная нагрузка на шариковый подшипник:

Динамическая приведенная нагрузка:
![]()
Необходимая динамическая грузоподъемность (принимаем расчетный срок службы подшипника 20000 часов):
![]()
По приложению 14[2], с учетом повышения надежности, выбираем подшипник №216 со значением С=56000Н.
Аналогично выбираем роликовый подшипник:
Наибольшая радиальная нагрузка на шариковый подшипник:

Динамическая приведенная нагрузка:
![]()
Необходимая динамическая грузоподъемность:
![]()
По приложению 14[2], с учетом повышения надежности, выбираем подшипник №2216 со значением С=78000Н.
В подшипниковых узлах делаем устройства для замены консистентной смазки.
ЗАКЛЮЧЕНИЕ
Спроектированный двигатель отвечает современным требованиям к асинхронным трехфазным электродвигателям общепромышленного исполнения. Сравнивая энергетические параметры спроектированного двигателя с аналогом (5А250S6У3) можно отметить чуть более низкий КПД по сравнению с аналогом – 91.8% против 93%, но также следует отметить больший коэффициент мощности – 0.86 против 0.83, таким образом,главный энергетический показатель (произведение КПД на cosφ) спроектированного двигателя 0.79 против 0.77 в аналоге.
К плюсам полученного двигателя можно отнести кратность пускового тока, равная 5.3, тогда как в аналоге 6.0, однако этот факт уравновешивается более низким пусковым моментом – 1.4 против 2.0. Перегрузочная способность двигателя достаточно высока – кратность максимального момента 2.4.
Согласно результатам теплового расчета, обмотка двигателя используется эффективно, превышение температуры обмоток над температурой окружающей среды около 62°С, что полностью соответствует рекомендуемому превышению для изоляции класса F.
Двигатель приблизительно на 30 кг легче аналога, имеет меньшую длину. Динамический момент инерции ротора на 20% меньше чем в аналоге, что является существенным плюсом для двигателя. Более низкий момент инерции был получен путем применения аксиальных охлаждающий каналов в сердечнике ротора, таким образом улучшили и охлаждение двигателя.
Механический расчет вала двигателя показал, что прогиб вала под серединой сердечника очень мал (менее 2% от зазора).
Двигатель оснащен устройством для замены консистентной смазки подшипников, тем самым увеличивая его надежность. Расчет надежности обмотки статора показал, что двигатель полностью соответствует ГОСТу 19523-74 по вероятности безотказной работы.
Конструкция двигателя была спроектирована в соответствии с рекомендациями Я.С. Гурина, изложенными в пособии «Проектирование серий электрических машин».
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Гольдберг О.Д. Проектирование электрических машин/О.Д. Гольдберг, Я.С.Гурин, И.С. Свириденко. – М.: Высшая школа, 2001. – 430с.
2. Гурин Я.С. Проектирование серий электрических машин. – М.: Энергия, 1998. – 480с.
3. Иванов-СмоленскийА.В. Электрические машины. Учебник для ВУЗов. – М.: Высшая школа, 2006. – 930с.
4. Копылов И.П. Проектирование электрических машин. – М.: Высшая школа, 2002. – 757с.
Похожие рефераты:
Электродвигатель асинхронный с короткозамкнутым ротором мощностью 200 КВт
Проектирование асинхронных двигателей
Разработка асинхронного двигателя с короткозамкнутым ротором
Проектирование асинхронного двигателя серии 4А
Расчет асинхронного электродвигателя
Проектирование асинхронного двигателя с короткозамкнутым ротором
Синхронные машины. Машины постоянного тока
Испытательная станция турбовинтовых двигателей ТВ3–117 ВМА–СБМ1 серийного производства