| Похожие рефераты | Скачать .docx |
Реферат: Система автоматической стабилизации пневмоколесной платформы для транспортировки крупногабаритных грузов
Система автоматической стабилизации пневмоколесной платформы для транспортировки крупногабаритных грузов
Содержание
1. Введение 2
2.1. Постановка задачи 9
2.2. Требования к процессу стабилизации ПКП в горизонтальном положении 9
2.3. Анализ существующих методов и средств стабилизации большегрузных пневмоколесных платформ 13
2.4. Разработка функциональной схемы 27
2.5. Элементы системы и принципы их функционирования 30
2.6. Алгоритм функционирования системы 43
3. Экономическая часть 45
3.1. Затраты на этапе разработки 46
3.2. Затраты на этапе производства, приведенные к одному году 52
3.3. Расчет доходов и затрат на один год производства 58
4. Безопасность жизнедеятельности 63
4.1. Введение 63
4.2. Конструктивные и эксплуатационные свойства, обеспечивающие безопасность ТС 64
4.3. Постановка задачи 68
4.4. Решение задачи 68
4.5. Вывод 72
5. Использованная литература 73
6. Приложение 76
1. Введение
Строительство и реконструкция промышленных предприятий тесно связаны с применением нового, более производительного оборудования и технологических установок. Повышению производительности технологических установок, применяемых в ряде отраслей промышленности, способствует увеличение их размеров и массы. Одновременно повышаются требования к качеству изготовления установок и срокам их монтажа. Решением возникающей проблемы в настоящее время является более высокая заводская готовность изделия вплоть до полной заводской сборки. Кроме того, существует ряд изделий, которые могут доставляться к месту монтажа только в полностью готовом виде (трансформаторы, барокамеры высокого давления и т.д.)
Во многих случаях транспортировка крупногабаритных и тяжелых изделий невозможна без помощи автомобильного транспорта. Для перевозки этих грузов применяют специальные транспортные средства - пневмоколесные платформы (ПКП).
Сегодня разработчикам уже не надо ломать голову над тем, как разделить многотонную конструкцию, чтобы перевезти ее частями, а затем снова собрать. Современные транспортные агрегаты способны доставить по назначению очень тяжелые грузы целиком. При этом они не теряют своей прочности и сохраняют точность геометрических параметров.
Все тяжеловозы и у нас в стране, и за рубежом похожи по принципу построения - их силовая рама или платформа с большим числом колес напоминает "многоножку". Супертяжелые автопоезда ездят по обычным автомобильным магистралям и мостам, не разрушая их, потому что вес груза равномерно распределяется между всеми колесами, число которых может доходить до двухсот.
Автопоезда для перевозки грузов большой массы и длины составляются из тягача (или нескольких тягачей) и прицепного звена. Тягачи устанавливаются либо спереди (цугом), либо спереди и сзади. Когда тягачи располагаются с двух сторон прицепного звена, нужна очень четкая координация действий водителей, особенно при переходе с одного режима движения на другой, поэтому во время работы они пользуются радио- или телефонной связью.
Транспортные агрегаты конструируются таким образом, чтобы к ним подходили серийные тягачи для перевозки обычных грузов. Их мощности вполне хватает для транспортировки тяжелого прицепного звена на небольшой скорости по ровной и гладкой дороге. Но дорога бывает мокрой, заснеженной, обледенелой, с подъемами и спусками. Чтобы тягач мог преодолеть эти трудности, прицепные звенья делают "активными" - снабжают ведущие колеса индивидуальным гидравлическим или электрическим мотором. Такие мотор-колеса отбирают часть мощности либо от двигателя тягача, либо от автономной системы энергообеспечения прицепного звена, например дизельной станции.
На тяжеловозах получили распространение мотор-колеса с индивидуальным электромеханическим приводом. В зависимости от назначения и условий движения они могут работать постоянно во всем диапазоне скоростей или периодически включаться только на наиболее тяжелых участках дороги. Мотор-колесо конструктивно объединяет тяговый электродвигатель, редуктор и колесо с шиной и тормозным механизмом. Осью электромеханического мотор-колеса служит корпус электродвигателя, на который на подшипниках посажено колесо с шиной. Крутящий момент от электродвигателя передается на обод через двух- или одноступенчатый редуктор. Такие колеса оборудуются дисковыми или барабанными тормозами с гидравлическим либо пневматическим приводом.
Прицепное звено тяжеловоза может быть соединено с тягачом тяговой связью (в виде прицепа) либо тягово-опорной (в виде полуприцепа). В полуприцепном варианте автопоезд становится короче, за счет чего улучшается его маневренность и увеличивается скорость движения. Тяжеловозы грузоподъемностью 100 тонн развивают скорость до 60 км/ч, а самые большие - грузоподъемностью 500 тонн и более - способны двигаться со скоростью до 30 км/ч.
Чтобы уменьшить нагрузку на опорно-сцепное устройство тягача и дорожное полотно, под грузовую платформу устанавливают промежуточные подкатные и бортовые тележки с двумя или четырьмя колесами. Тележки скомпонованы несколько иначе, чем мотор-колеса - тяговый электродвигатель с редуктором располагается снаружи колеса перпендикулярно его оси.
Большая длина автопоезда с очень тяжелым грузом создает проблему на поворотах. Ее решает гидромеханическая система управления поворотом колес следящего типа. С помощью этой системы прицепные звенья автоматически поворачиваются в зависимости от угла поворота тягача, и тяжеловоз довольно легко вписывается в габариты дороги на поворотах, маневрирует на строительных и заводских площадках. Например, 40-метровый автопоезд без проблем проходит поворот радиусом меньше 25 метров.
Оптимальный режим движения создает электромеханическая трансмиссия. Благодаря ней минимизируются потери на переходных режимах и при трогании с места, улучшаются тяговые и тормозные характеристики тяжеловоза, снижаются затраты на его обслуживание. Кроме того, с электромеханической трансмиссией проще управлять большим числом колес.
Чтобы многоколесный автопоезд имел постоянный контакт колес с дорожным полотном и равномерную нагрузку на все колеса, применяют независимую подвеску либо с упругими элементами, либо без них, но с балансирной связью между отдельными группами колес или со всеми колесами. Для повышения безопасности движения тормозная система прицепного звена делается многоконтурной (минимум - двухконтурной): отдельно для передних и задних колес всех звеньев.
Сегодня разрабатываются тяжеловозы в виде максимально унифицированных транспортных модулей грузоподъемностью по 60-120 тонн. Из них можно собирать большегрузные самоходные многоосные платформы практически любой грузоподъемности. Модули жестко соединяются в продольном и поперечном направлениях, образуя единую грузовую площадку. Такие самоходные агрегаты, оснащенные широкопрофильными шинами, могут найти применение в горнодобывающей, нефтяной и газовой отраслях. Они способны доставить к месторождениям, приискам и скважинам крупногабаритное оборудование, обогатительные фабрики, лаборатории или жилые комплексы. Тянуть туда железнодорожные ветки или строить специальные автодороги гораздо дороже. На подвижных платформах может быть смонтировано оборудование для обеззараживания почвы и переработки токсичных веществ, например в труднодоступных районах падения отработавших частей ракет.
По мнению специалистов, самоходные платформы-модули благодаря их высокой мобильности и большой грузоподъемности будут все более востребованы.
Специфика транспортируемого груза привела к ряду новых конструктивных решений многоопорных пневмоколесных платформ.
Для обеспечения проезжаемости транспортное средство большой массы не должно разрушать покрытие дорог, различные сооружения на них. Для этого нужно, чтобы нагрузка была распределена по опорной поверхности наиболее равномерно. Это приводит к ряду особенностей в конструкции и технологических требований. Транспортное средство должно быть многоопорным (многоколесным) с возможно более равномерным размещением опор по несущей поверхности. Обычно используется матричное расположение опор по дороге и, соответственно, по платформе. Возможны и другие, но не используются. Расстояния между опорами при этом определяются по соответствующим стандартам.
Возможное число опор ПКП ограничено стандартами, которые заставляют увеличивать нагрузку на опору вплоть до максимальной по несущей способности дороги. В этом случае в качестве подвески приходится использовать гидравлические цилиндры. Известно, что при движении в несвязанных опорах возникает существенный разброс по нагрузкам. Стремление уменьшить разброс нагрузок по опорам (и, следовательно, по дороге) привел к организации балансирных гидравлических связей между гидроцилиндрами опор, делая их как можно обширнее. Поэтому все транспортные средства имеют три или четыре (не более) гидробалансира. Главное назначение балансирных гидравлических связей подвесок в группах и групп по трех- или четырехточечной опорной схеме - обеспечение равномерного распределения вертикальных нагрузок по опорам. При трехточечной структуре подвески (три гидравлических группы) ПКП может двигаться по наиболее неровной дороге благодаря отсутствию изгибных деформаций. При четырехточечной опорной схеме (четыре гидравлических группы) обеспечивается устойчивость, которой обладает обычный двухосный автомобиль нормальной компоновки.
При движении транспортного средства все-таки возникает разброс нагрузок по опорам даже с учетом балансирных связей. Он порождается динамическими и статическими перегрузками, определяемыми инерционными силами и силой тяжести. Поэтому, во-первых, снижают скорость движения при возрастании массы груза. Таким образом, малая скорость движения есть технологическое требование или ограничение. Во-вторых, оснащают гидросистему подрессоривания гидроприводом и стабилизируют платформу в горизонтальном положении. Иногда используют изменение структуры балансирных связей, связывая это, впрочем, с устойчивостью и запасами устойчивости транспортного средства.
Большие размеры груза требуют использования большой площади погрузочной платформы и уменьшения опрокидывающих моментов на транспортное средство. В связи с этим конструкция ТС приобрела вид платформы с расположенными под ней колесными опорами. Недостаток такой конструкции - повышение уровня несущей части - компенсируется уменьшением радиуса колес и использованием систем стабилизации ПКП в горизонтальном положении.
При значительных габаритах ПКП возникает необходимость обеспечить маневренность ТС, то есть вписываемость его в габариты дорог и их кривизну. Для этого необходимо, чтобы все колеса были управляемыми, и поворот их обеспечивался на большие углы, доходящие до 90°. Механические тяги этого обеспечить не могут и используют электрогидравлическое рулевое управление с рулевыми программами: карусельное движение, поперечное движение, поворот с произвольным радиусом и т.д.
Еще один ряд особенностей транспортных средств для перевозки особо тяжелых грузов связан с габаритами и разнообразием груза.
Разнообразие груза находится в противоречии с серийностью выпускаемых транспортных средств. Желательно их унифицировать. Унификация конструкции привела к многомодульному построению транспортных комплексов. Причем типаж модулей достаточно широк - от двуосных модулей до восьмиосных. Они могут стыковаться как бортами, так и друг за другом. Из нескольких модулей могут собираться не только состыкованные транспортеры, но и разнесенные в пространстве и связанные грузом, либо грузовой балкой. Иногда в типаж включают одну опору с тем, чтобы наращивать не две ширины при стыковке бортами, а половину. Это немаловажно при ограничении ширины проезжей части.
Состыковка модулей в большие транспортные комплексы усложнила задачу равномерного распределения нагрузок по опорам ПКП. В настоящее время ее решают созданием единой гидравлической системы для всего транспортного комплекса, работающей подобно гидравлической системе одного модуля. При этом повышается мощность силовых установок, необходимая для функционирования системы стабилизации, и требуется одновременная работа нескольких насосных станций. Одним из возможных способов избежать создания дополнительной системы, обеспечивающей совместную работу нескольких насосных станций, является использование более полно систем стабилизации каждого модуля, входящего в транспортный комплекс.
Сложности, вызываемые длительностью и трудоемкостью такелажных работ, привели к изменению процесса погрузки-разгрузки. Используя систему подрессоривания как гидродомкрат, можно развести во времени такелажные и погрузочно-разгрузочные работы, устанавливая груз на некоей несущей платформе так, чтобы транспортное средство могло под нее заехать, поднять платформу, убрать опоры несущей платформы и, оставив груз на транспортере, двигаться уже с грузом.
Значительные размеры и масса транспортируемого оборудования определяют большие нагрузки, возникающие в конструкции ПКП и передаваемые на дорожную поверхность. Ограничения, налагаемые несущей способность дорожной поверхности, потребовали равномерного распределения нагрузок по опорам ПКП. Применение ряда новых конструктивных решений на таких транспортных средствах позволило достичь в этом направлении многого. Однако перераспределение нагрузки, возникающее в результате воздействия дорожных возмущений, компенсировать конструктивными изменениями не удается и поэтому в настоящее время равномерность распределения нагрузок по опорам при действии на ПКП дорожных возмущений достигается стабилизацией ПКП в горизонтальном положении при помощи управления гидроприводом системы подвесок. Управление обычно осуществляет оператор.
Появление возможности управлять подвесками ПКП позволило более эффективно использовать ПКП при проведении бескрановых погрузочно-разгрузочных работ, повысить устойчивость ПКП по опрокидыванию, расширить диапазон преодолеваемых дорожных неровностей, упростить создание многомодульных транспортных комплексов. Дальнейшее повышение эффективности использования ПКП ограничивается возможностями человека-оператора и требует разработки системы автоматической стабилизации (САС) ПКП в горизонтальном положении при движении по дороге и при проведении бескрановых погрузочно-разгрузочных работ.
Таким образом, система стабилизации модуля ПКП в горизонтальном положении является неотъемлемой частью ТС. Применение системы автоматической стабилизации ПКП позволит повысить безопасность движения ПКП, упростить проведение погрузочно-разгрузочных работ и расширить возможности модульной комплектации ТС для транспортировки крупногабаритных грузов.
Создание системы стабилизации ПКП является актуальной задачей.
2.1. Постановка задачи
Требуется разработать систему автоматической стабилизации пневмоколесной платформы для перевозки крупногабаритных грузов. Система должна обеспечивать горизонтальное положение платформы на заданной высоте с достаточной точностью как в движении, так и при проведении погрузочно-разгрузочных работ. Управление системой - микропроцессорное.
2.2. Требования
к процессу стабилизации ПКП в горизонтальном положении
С точки зрения протекания процесса управления, требования к системе автоматической стабилизации формируются по трем основным направлениям:
- точность;
- устойчивость;
- качество переходного процесса.
Точность системы задается и определяется в установившихся режимах. Устойчивость гарантирует затухание переходного процесса, после чего обеспечивается желаемое качество затухающего переходного процесса.
На движущуюся платформу действует только одно возмущение - дорожная поверхность. Она же определяет отклонение платформы от горизонтального положения. Возврат платформы в исходное положение подвеска, даже с упругим элементом, обеспечить не может. Поэтому устойчивость горизонтального положения должна достигаться при синтезировании закона управления. Вид закона управления определяется внутренними связями объекта управления и не зависит от каких-либо других условий.
Качество переходного процесса стабилизации пневмоколесной платформы целиком определяется уровнем дорожных возмущений и требуемой точностью стабилизации.
Таким образом, исходным требованием к процессу стабилизации платформы в горизонтальном положении, является точность стабилизации платформы. Поэтому представляется интересным и важным указать зависимости между точностью стабилизации платформы и требованиями эксплуатации транспортных средств такого класса, а также связать точность стабилизации с параметрами самого транспортного средства.
Среди преимуществ, которые дает управление гидробалансирными подвесками, основными являются три:
- обеспечение устойчивости платформы по опрокидыванию;
- подъем и опускание платформы при проведении погрузочно-разгрузочных работ;
- расширение диапазона преодолеваемых дорожных неровностей.
Очевидно, что обеспечение устойчивости платформы - единственное из перечисленных условие, которое накладывает ограничения на уровень стабилизации платформы.
Есть еще одно условие, которое накладывает ограничение на уровень стабилизации платформы. На него прямо нигде не указывается, но наличие его всегда подразумевается.
Появление гидравлических балансирных подвесок на пневмоколесных платформах не случайно. Нагрузки на опоры столь велики, что ни одна другая подвеска надежно работать не будет. Появление гидробалансиров связано с необходимостью более равномерно распределять нагрузки как на дорогу, так и на саму платформу. Минимально возможное число гидробалансиров - три. Поэтому равномерно распределить нагрузку между ними можно лишь управляя положением пневмоколесной платформы. Горизонтальность при этом возникает из симметрии такого положения и невысоких скоростей движения ПКП.
Таким образом, точность стабилизации ПКП необходимо выбирать исходя из условий устойчивости платформы по опрокидыванию и заданного уровня перегрузок по гидравлическим опорам.
Будем понимать под точностью стабилизации допустимые углы наклона платформы, при которых она еще не теряет некоторых своих свойств. Отнесем к таким свойствам устойчивость пневмоколесной платформы против опрокидывания при движении, а более высокий уровень стабилизации может быть определен в терминах перегрузок на опоры пневмоколесной платформы, так как горизонтальная стабилизация - это одновременно уменьшение опрокидывающих моментов силы тяжести.
Под устойчивостью будем понимать неопрокидываемость пневмоколесной платформы.
Следует отметить, что углы продольного и поперечного крена зависят как друг от друга, так и от изначального положения центра тяжести системы ПКП + груз.
На основании полученных требований на точность стабилизации платформы были рассчитаны величины этих требований для проектируемой пневмоколесной платформы, основные параметры которой приведены в приложении.
Табл. 2.1. Требуемая точность стабилизации пневмоколесной платформы.
| Перегрузки |
g3 = 6 м |
g3 = 4 м |
||
| a*, град |
j*, град |
a*, град |
j*, град |
|
| 50% |
3,1 |
7,6 |
4,7 |
11,5 |
| 40% |
2,6 |
6,3 |
3,8 |
9,4 |
| 30% |
1,8 |
4,4 |
2,7 |
6,7 |
| 20% |
1,3 |
3,0 |
1,9 |
4,6 |
| 10% |
0,9 |
1,8 |
1,1 |
2,5 |
В данной таблице приняты следующие условные обозначения:
g3
- высота центра тяжести груза;
a* и j* - точность стабилизации соответствующих угловых колебаний.
Данные в таблице показывают, что при транспортировке крупногабаритных грузов не рационально стабилизировать платформу с точностью, превышающей 1°.
Итак, здесь можно сделать следующие выводы:
1. Основным критерием при проектировании системы автоматической стабилизации пневмоколесной платформы является точность стабилизации. Точность стабилизации определяется устойчивостью платформы по опрокидыванию, и допустимым уровнем перегрузок опор.
2. Расчет точности стабилизации проектируемой пневмоколесной платформы позволяет для дальнейших исследований принять, что стабилизировать пневмоколесную платформу достаточно с точностью 1°.
2.3. Анализ существующих методов и средств стабилизации
большегрузных пневмоколесных платформ
Автомобильные перевозки тяжелых и сверхтяжелых негабаритных грузов характеризуются большой сложностью в отношении как их организации, так и технического обеспечения особыми транспортными средствами. Преимущественное распространение в этих перевозках получили автомобильные поезда специализированного производства, обеспечивающие буксирование прицепов общей массой в несколько сотен тонн. Удовлетворить возрастающие требования к таким автопоездам, учитывая их недостатки, все труднее. Этим, видимо, можно объяснить появление нового типа транспортных средств для перевозки сверхтяжелых грузов - многоопорных пневмоколесных платформ (ПКП). Общий вид ПКП представлен на рисунке 2.1.
Рис. 2.1. Общий вид ПКП
Возможное число опор ПКП ограничено стандартами, которые заставляют увеличивать нагрузку на опору вплоть до максимальной по несущей способности дороги. В этом случае в качестве подвески приходится использовать гидравлические цилиндры. Известно, что при движении в несвязанных опорах возникает существенный разброс по нагрузкам. Стремление уменьшить разброс нагрузок по опорам (и, следовательно, по дороге) привел к организации балансирных гидравлических связей между гидроцилиндрами опор, делая их как можно обширнее. Поэтому все транспортные средства имеют три или четыре (не более) гидробалансира. Главное назначение балансирных гидравлических связей подвесок в группах и групп по трех- или четырехточечной опорной схеме - обеспечение равномерного распределения вертикальных нагрузок по опорам. При трехточечной структуре подвески (три гидравлических группы) ПКП может двигаться по наиболее неровной дороге благодаря отсутствию изгибных деформаций. При четырехточечной опорной схеме (четыре гидравлических группы) обеспечивается устойчивость, которой обладает обычный двухосный автомобиль нормальной компоновки.
Рассмотрим известные электронные системы стабилизации ПКП. Среди них можно выделить две различные по назначению системы: равномерного подъема и опускания платформы для проведения бескрановых погрузочно-разгрузочных работ и систему стабилизации ПКП, которая обеспечивает горизонтальное положение платформы при движении по дороге.
Наиболее широко используется электронные системы для обеспечения погрузочно-разгрузочных работ. Основным их достоинством является отсутствие необходимости делать поправки на утечки рабочей жидкости.
Система электронного регулирования подъема платформы фирмы Камаг представлена на рисунке 2.2. она рассчитана на транспортные средства с четырьмя гидробалансирами. В каждый гидробалансир включены гидроцилиндры трех опор и специальный гидроцилиндр, который одной полостью соединен с гидрогруппой, а другой полостью через гидравлический распределитель - с гидронасосом. Камера каждого специального гидроцилиндра рассчитана на полный объем гидроцилиндра опор гидробалансирной группы.
Электронная система включает в себя четыре датчика высоты платформы, четыре гидрораспределителя, управляющее электронное устройство и переключатель. 
Рис. 2.2. Электронная система автоматического подъема и опускания ПКП фирмы Камаг
Датчики высоты представляют по существу датчики углов потенциометрического типа, которые устанавливаются на одну из опор в группе на рычаг подвески. Угол складывания рычага пропорционален вертикальному положению грузонесущей платформы и, таким образом, потенциометрические датчики углов дают высоту платформы около соответствующей опоры. Переключатель, установленный в кабине водителя, приводит систему в рабочее состояние и отключает ее. Кроме указанных приборов система включает четыре показывающих прибора, отражающих измеренное фактическое значение высоты платформы в четырех точках, также установленных в кабине водителя. Они служат для визуального контроля за подъемом или опусканием платформы. Предусмотрено управление положением платформы в ручном режиме.
При установке переключателя в рабочее положение электронное устройство снимает данные с потенциометрических датчиков углов, сравнивает их между собой и с некоторым заданным значением и выдает сигнал управления на гидрораспределители. Гидрораспределители подают в каждый специальный цилиндр объем рабочий жидкости, пропорциональный входному напряжению, и через них подают масло в гидробалансирные группы.
Недостатками рассмотренной системы управления является невозможность выдержать горизонтальность платформы на негоризонтальной поверхности и несовместимость ее с системой стабилизации ПКП в движении. Однако довольно часто при использовании ПКП в заводских условиях равномерность подъема платформы достаточна для применения такой системы.
Другой основной способ управления подвесками многоопорной ПКП заключается в стабилизации платформы ПКП в горизонтальном положении (горизонтирование). Для примера опишем его использование в автоматизированной системе горизонтирования фирмы "Шаурле", где управление осуществляется под непосредственным контролем оператора. Подобными системами оснащены все многоопорные ПКП.
Функциональная схема гидравлической системы подрессоривания и управляющих ею аппаратов приведена на рисунке 2.3. Система горизонтирования приводится в действие насосным агрегатом, который состоит из двигателя внутреннего сгорания, гидронасоса высокого давления, масляного фильтра, предохранительного клапана и манометра, и через блок трехпозиционных гидрораспределителей связана с гидроцилиндрами опор.
На пульте управления в блоке гидрораспределителей установлены четыре рукоятки управления подъемом и опусканием идеальной точки ("гидравлической точки"), отражающей центр силового воздействия группы. 
Рис. 2.3. Система горизонтирования фирмы Шаурле
1 - масляный бак; 2 - блок гидрораспределителей с механическим управлением; 3 - масляный фильтр; 4 - насос; 5 - манометр; 6 - ДВС; 7 - управление поворотом ПКП.
Каждая рукоятка управляется одним из четырех возможных гидравлических контуров и в зависимости от положения рукоятки может осуществлять подъем или опускание гидравлической точки. Клапаны гидрораспределителей работают бесступенчато, то есть расход масла через них пропорционален углу поворота рукоятки управления и не зависит от давления и вязкости жидкости. Действуя одновременно всеми четырьмя рукоятками (при трехточечном опирании - тремя), можно обеспечить подъем платформы без существенного перекоса. Если одна из гидравлических точек выдвигается быстрее других, то можно соответственно уменьшить угол поворота нужной рукоятки и корректировать таким образом работу любой гидравлической точки. Опускание и горизонтирование происходят аналогично. При этом для нормальной работы на систему управления наложено жесткое условие - центр тяжести груза должен находиться в геометрическом центре платформы ПКП.
Автоматическое горизонтирующее устройство использует фирма "Трабоза" (рис. 2.4.). Применение его позволяет исключить нарушение горизонтальности платформы при движении по дороге с поперечным уклоном.
Устройство включает в себя гидравлический уравнительный цилиндр двойного действия, корпус которого связан с гайкой ходового винта, причем привод последнего осуществляется гидромотором, системой клапанов, а также датчиком положения платформы. При нарушении горизонтального положения платформы в поперечном направлении срабатывает датчик положения, при этом начинается вращение гидромотора и ходового винта в направлении, при котором перемещение корпуса гидроуравнительного цилиндра обеспечивает подачу дополнительного количества рабочей жидкости в тот бортовой контур, в сторону которого произошло опускание платформы. При этом одновременно забирается равное количество рабочей жидкости из противоположного бортового контура. Это продолжается до тех пор, пока платформа вновь не займет горизонтальное положение.
Применение автоматического горизонтирующего устройства позволяет:
- наиболее быстро произвести подъем одного борта ПКП при одновременном_опускании_другого;
- снизить величину мощности, необходимой для горизонтирования;
- сохранить неизменной первоначально установленную высоту и горизонтальность платформы при различных условиях эксплуатации.

Рис. 2.4. Автоматическое горизонтирующее устройство фирмы Трабоса
1 - насос; 2 - датчик положения; 3 - гидрораспределитель; 4 - гидродвигатель; 5 - ходовой винт; 6 - гидравлический уравнительный цилиндр.
При продольном уклоне, при перераспределении нагрузок, вызываемом силами инерции и центробежными силами необходимо вводить поправки на максимальную величину перевозимого груза.
Еще одной отличительной особенностью ПКП фирмы "Трабоза" является наличие специальной электронной контролирующей системы подвесок, одна из функций которой - расчет веса транспортируемого груза и положения проекции центра тяжести на плоскость несущей платформы. Эта информация затем выводится на дисплей в кабине водителя.
Приведенные системы управления подвесками многоопорных ПКП не обеспечивают полностью равномерного распределения нагрузок по гидравлическим группам в автоматическом режиме. Поэтому они требуют дополнительного внимания со стороны водителя - оператора и ограничены его возможностями. Чем сложнее груз, больше его масса, тем труднее оператору стабилизировать платформу в горизонтальном положении, особенно при движении по дороге. Важным недостатком приведенных систем управления является сложность их интегрирования на одном транспортном средстве, сформированном из нескольких модулей ПКП.
Применение микропроцессорных систем для управления подвесками позволяет обеспечить стабилизацию платформы большегрузного автотранспортного средства с высокой точностью (до 0,1°). Однако подробных сведений о таких зарубежных системах нет, хотя потребность в них увеличивается, особенно в связи с созданием многомодульных автотранспортных средств.
Среди известных систем стабилизации подрессоренных масс других транспортных средств выделим две: систему управления подвесками многоосного транспортного средства, как наиболее близкую по конструкции транспортного средства, и устройство для поддержания горизонтального положения кузова автомобиля, как наиболее близкую по характеру решаемых задач.
Система управления активными подвесками многоосного автотранспортного средства (рис. 2.5.) включает в себя датчики 1 и 3 продольного a и поперечного j крена маятникового типа, датчик 2 изменения DG статического веса подрессоренного корпуса автотранспортного средства тензометрического типа, датчик 4 скорости V движения автотранспортного средства тахеометрического типа, измеряющий скорость по числу оборотов вращающихся деталей двигателя или силовой передачи, датчик 5 угла W поворота рулевого колеса потенциометрического типа. 
Рис. 2.5. Электронная система управления активными подвесками многоосного автомобиля
Выходы датчиков 1-5 через низкочастотные фильтры 6 соединены с входами блока 7 аналого-цифровых преобразователей.
Для получения сигналов, пропорциональных продольным ускорениям ![]() транспортного средства и угловой скорости
транспортного средства и угловой скорости ![]() вращения рулевого колеса, система снабжена дифференцирующими звеньями 8 и 9, входы которых через низкочастотные фильтры соединены с выходами датчиков скорости ТС и угла поворота рулевого колеса, а выходы - с блоком 7 АЦП. Каждый из АЦП в блоке 7 совместно с низкочастотными фильтрами 6 и датчиками 1-5, а также дифференцирующими звеньями 8 и 9, образуют каналы измерения перечисленных величин.
вращения рулевого колеса, система снабжена дифференцирующими звеньями 8 и 9, входы которых через низкочастотные фильтры соединены с выходами датчиков скорости ТС и угла поворота рулевого колеса, а выходы - с блоком 7 АЦП. Каждый из АЦП в блоке 7 совместно с низкочастотными фильтрами 6 и датчиками 1-5, а также дифференцирующими звеньями 8 и 9, образуют каналы измерения перечисленных величин.
В блоке 7 непрерывные сигналы датчиков 1-5 и сигналы, поступающие с выхода дифференцирующих звеньев 8 и 9, преобразуются в дискретный цифровой код, что повышает точность системы и ее быстродействие.
Выходы АЦП соединены соответственно с блоками 10 и 11 определения продольной и поперечной устойчивости. Эти блоки предназначены для вычисления составляющих усилий, действующих на подрессоренный корпус АТС в функции изменения измеряемых параметров по определенным зависимостям, заложенным в их память, и для последующего суммирования величин указанных составляющих усилий. Кроме того, эти блоки предназначены для формирования управляющих сигналов в системе управления при превышении измеряемыми параметрами заданных допустимых значений. Для этого оно снабжены соответствующими логическими устройствами или встроенными в память таблицами ситуаций. Так достигается продольная и поперечная устойчивость АТС.
При движении АТС по неровной дороге в случаях, когда измеряемые датчиками 1-5 параметры не превышают заданных допустимых значений, записанных в память блоков 10 и 11, последние выдают управляющие сигналы, пропорциональные рассчитанным поверхностным силам. Эти управляющие сигналы поступают в блоки 14-22, где сравниваются с сигналами реальных поверхностных сил, поступающими из датчиков 28. Поэтому на выходе из блоков сравнения сил формируются управляющие сигналы Uiл и Uiп , пропорциональные лишь динамической нагрузке, зависящей только от микропрофиля дороги, и поступающие затем в силовой привод активных подвесок. Этим обеспечивается плавность хода АТС.
По функциональному составу описанная система управления способна выполнить практически любую задачу управления подрессоренной массы, так как обеспечивает получение всей информации о положении кузова. Однако заложенный в нее алгоритм не позволяет стабилизировать кузов в горизонтальном положении. Кроме того, вполне вероятно, что система управления подвесками многоосного автомобиля будет избыточна при переложении ее на ПКП и при изменении целей ее работы.
Устройство для поддержания горизонтального положения кузова автомобиля имеет функциональную схему, которая представлена на рис. 2.6.
![]()
|
|
|
|
|
Рис. 2.6. Устройство для поддержания горизонтального положения кузова.
|
|

1, 2, 3, 4 - датчики уровня кузова автомобиля; 5 - датчик поперечного крена; 6 - датчик продольного крена; 7 - датчик углов поворота рулевых колес; 8 - датчик скорости автомобиля; 9 - задатчик уровня кузова; 10 - компьютер; 11, 12, 13, 14 - исполнительные органы горизонтирующего механизма
Автомобиль оборудован центральным вычислительным устройством 10, которое по заданной программе обрабатывает сигналы с датчиков 1-4 уровня кузова автомобиля, датчика 5 поперечного наклона, датчика 6 продольного наклона, датчика 7 угла поворота рулевого колеса, датчика 8 скорости автомобиля, задающего устройства 9, устанавливающего желаемый уровень кузова автомобиля, и определяет, необходимо или нет управление положением кузова. Если необходимо, то по предписанной программе центральное вычислительное устройство выдает управляющие сигналы на исполнительные органы 14-17 горизонтирующего устройства в соответствии с входными сигналами от датчиков 1-9.
Основными недостатками этого устройства являются измерение хода подвесок и эвристический, а поэтому достаточно сложный алгоритм управления.
Таким образом, ни одна из систем стабилизации подрессоренных масс автотранспортных средств, включая и ПКП, не способна обеспечить стабилизацию ПКП в горизонтальном положении при движении по дороге и при проведении бескрановых погрузочно-разгрузочных работ. Необходимо разрабатывать новую систему.
Анализ технологических функций, выполняемых грузонесущей платформой большегрузного автотранспортного средства, показал, что система автоматической стабилизации пневмоколесной платформы должна выполнять три операции: сохранять горизонтальное положение платформы в движении, горизонтировать платформу при погрузочно-разгрузочных операциях и контролировать загрузку платформы. Последняя операция не относится к управлению платформой и поэтому рассматриваться не будет.
Из физических соображений ясно, что для стабилизации платформы в горизонтальном положении достаточно управлять подачей рабочей жидкости в две гидравлические группы, например в группы 1 и 2. Тогда ограничений на подачу жидкости в третью группу нет. Система автоматической поперечной стабилизации пневмоколесной платформы фирмы Шаурле обеспечивает уменьшение затрат мощности за счет одновременной подачи жидкости в одну группу и слива рабочей жидкости из другой. Давление нагнетания в гидросистеме подвесок ПКП поддерживается постоянным.
Отметим, что понятие стабилизации клиренса вполне совпадает с основным принципом, по которому осуществляет управление оператор: "на сколько поднял один борт, на столько же опустил другой". Этот же принцип по существу лежит в основе работы системы автоматической стабилизации в поперечном направлении пневмоколесной платформы фирмы Шаурле, крутосклонных тракторов и сельскохозяйственной техники, в основе стабилизации колесных машин. Но во всех этих системах стабилизации он решался конструктивно, поскольку рассматривалась стабилизация только одной угловой координаты, и поэтому в законах управления не фигурировал.
При отсутствии ограничений в гидроприводе системы подрессоривания неровность, которую пневмоколесная платформа может преодолеть без потери платформой горизонтального положения, будет максимальна, если объем рабочей жидкости в гидрогруппах при преодолении этой неровности будет минимален.
Рассмотренные системы стабилизации ПКП и подрессоренной массы автомобиля, а также общие принципы создания систем управления, показывают, что основой для разработки системы стабилизации ПКП является алгоритм управления системой подвесок ПКП. После получения алгоритма появляется возможность определить функциональную и структурную схемы системы управления и осуществить выбор технических устройств, реализующих систему стабилизации.
Исходя из вышеизложенного можно сделать следующие выводы:
1. Опыт эксплуатации ПКП показывает, что система стабилизации ПКП является неотъемлемой частью ТС.
2. Применение систем автоматической стабилизации ПКП в горизонтальном положении позволит повысить безопасность ее движения, равномерно распределить нагрузки по опорам, упростить управление ПКП при движении и при проведении погрузочно-разгрузочных работ, упростить комплектацию многомодульных транспортных средств и, в конечном итоге, повысить эффективность использования ПКП.
3. Существующие САС ПКП обеспечивают стабилизацию поперечно-угловых колебаний в движении и равномерный подъем и опускание платформы при проведении погрузочно-разгрузочных работ. Информация о более сложных САС ПКП пока отсутствует. Использование САС подрессоренной массы других типов автомобилей неприемлемо по ряду конструктивных отличий ПКП и недостаточному алгоритмическому обеспечению САС. Задача создания САС ПКП является актуальной.
4. Невысокие технологические скорости движения ПКП при транспортировке грузов, близких по массе к максимально допустимой для ПКП, позволяет рассматривать задачу стабилизации ПКП в горизонтальном положении только при прямолинейном равномерном движении и при проведении погрузочно-разгрузочных работ.
2.4. Разработка функциональной схемы
|
|
|
|
|
|
|
|
|
|
|
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
![]()
![]()
|
![]()
![]()
![]()
![]()
![]()
![]()
|
|
|
|
|

Известные законы управления позволяют в общих чертах выяснить как надо реализовывать обратную связь между входными и выходными координатами ПКП как объекта управления. Для замыкания системы автоматической стабилизации необходимо снять информацию об угловом положении ПКП и о ее вертикальном положении и, обработав эту информацию по соответствующим законам, изменить расход жидкости в гидрогруппы, то есть законы управления определяют обратную связь как показано на рисунке 2.7.
Рис. 2.7. Структура САС, реализующая законы управления
УУ - управляющее устройство; ПКП - пневмоколесная платформа; h0 - заданная высота подъема платформы; Q - объемный расход жидкости; S - площадь силового гидроцилиндра; V - объем жидкости в гидрогруппах; a - поперечный крен платформы; j - продольный крен платформы; x - дорожное возмущение.
Обратную связь такого вида реализовать техническими устройствами невозможно. Во-первых, необходимо выяснить, как можно получить или измерить клиренс ПКП. Во-вторых, управление подачей жидкости в гидрогруппы осуществляется не непосредственно управляющим устройством, а через гидрораспределители. Последние являются сложным техническим объектом и включают в себя электронный усилитель, электромеханический преобразователь и гидроусилитель. Входная координата гидрораспределителя - напряжение в обмотке катушки электромеханического преобразователя, выходная координата - смещение золотника гидрораспределителя.
В качестве структуры гидропривода системы подвесок может быть выбрана схема регулирования объемно-дроссельного регулирования или дроссельного регулирования с постоянным давлением нагнетания. Регулирование второй схемы осуществляется более просто, к.п.д. у нее достаточно высок.
В системах стабилизации ПКП обычно используется один регулируемый насосный агрегат и блок гидрораспределителей. Регулируемым насосом и блоком гидрораспределителей можно управлять так, чтобы давление и расход насоса и расход жидкости в гидрораспределителях соответствовал необходимому расходу жидкости в гидросистемах подвесок. Такое управление гидроприводом достаточно сложное по сравнению со схемой гидропривода, часто используемой при работе насоса с несколькими гидрораспределителями. В последнем случае используется гидропривод с источником питания постоянного давления. Такой привод просто управляется и имеет достаточно высокий к.п.д. будем ориентироваться именно на такую структуру гидропривода.
Непосредственное измерение клиренса невозможно. Для его вычисления необходимо измерять либо ход каждой подвески с помощью поворотного потенциометрического датчика на рычаге подвески или датчика линейных перемещений, либо измерять уровень жидкости в гидробаке.
Таким образом, САС ПКП должна включать в себя датчики продольного и поперечного крена ПКП, датчик уровня жидкости в гидробаке или датчики хода всех подвесок, блок электрогидравлических распределителей, задатчик высоты подъема платформы и управляющее устройство. Взаимосвязь между ними дается законами управления. На основании этого можно составить блок-схему САС ПКП и описать принцип ее работы.
САС работает следующим образом. Перед движением ПКП оператор устанавливает задатчик высоты платформ, вмонтированный в пульте оператора, на заданной величине. Одновременно управляющее устройство приводит в действие соответствующий закон управления. Гидрораспределители подают в каждый цилиндр объем масла, пропорциональный входному напряжению. После выставки платформы в горизонтальном положении на заданном уровне ее высоты оператор приводит в движение платформу. При этом, однако, надо иметь в виду, что в движении может не хватить запасов мощности для одновременного подъема платформы и ее стабилизации. Поэтому такой режим работы нежелателен.
2.5. Элементы системы и принципы их функционирования
Для работы микропроцессорной системы управления требуется информация о текущих продольном и поперечном кренах платформы, а также о текущей и требуемой высоте платформы.
Выбирая датчик положения (табл. 2.2.), прежде всего, необходимо правильно определить приоритеты по следующим критериям:
· разрешение и точность;
· линейность;
· скорость измеряемого процесса;
· условия применения и класс защиты;
· надёжность;
· габаритные размеры;
· стоимость.
Расставив приоритеты, необходимо учесть, что датчик может определять абсолютное или относительное положение контролируемого объекта. Исходя из этого, существуют два основных метода определения положения и измерения перемещений. В первом методе датчик вырабатывает сигнал, являющийся функцией положения одной из его частей, связанных с подвижным объектом, а изменения этого сигнала отражают перемещение. Такие датчики положения называются абсолютными. К ним относятся:
· резистивные (потенциометрические) датчики;
· индуктивные датчики с подвижным сердечником;
· ёмкостные датчики с подвижными обкладками;
· цифровые кодовые датчики абсолютных значений.
Во втором методе датчик генерирует единичный импульс на каждом элементарном перемещении, а положение определяется подсчётом суммы импульсов в зависимости от направления перемещения. Такие датчики положения называются относительными. Достоинством таких датчиков, по сравнению с абсолютными, является простота и низкая стоимость, а недостатком — необходимость периодической калибровки и дальнейшей микропроцессорной обработки.
Табл. 2.2. Сравнительная характеристика различных видов датчиков
| Технологические требования при измерительном процессе |
Типы датчиков |
||||||||||||||||||||||
| Потенцио-метри-ческий, |
Потенцио-метри-ческий, |
Емкост-ной |
Индук-тивный LVDT |
Инкрементальный |
Абсолютный |
||||||||||||||||||
| Оптоэлект-рический |
Магнитно-резис |
Механи-ческий |
Оптоэлект-рический |
Магнитно- |
Механи-ческий |
||||||||||||||||||
| Очень высокое разрешение |
нет |
нет |
нет |
Некото-рые модели |
да |
нет |
нет |
да |
нет |
нет |
|||||||||||||
| Высокое разрешение |
нет |
да |
да |
да |
да |
нет |
нет |
да |
нет |
нет |
|||||||||||||
| Низкое разрешение |
да |
да |
да |
да |
да |
да |
да |
да |
да |
да |
|||||||||||||
| Скорость процесса >5 м/с |
нет |
Некото-рые модели |
да |
Некото-рые модели |
нет |
нет |
нет |
да |
нет |
нет |
|||||||||||||
| Малые размеры |
да |
да |
нет |
Некото-рые модели |
Некото-рые модели |
Некото-рые модели |
да |
Некото-рые модели |
Некото-рые модели |
Некото-рые модели |
|||||||||||||
| Высокий класс защиты (IP65) |
да |
да |
нет |
да |
Некото-рые модели |
Некото-рые модели |
нет |
Некото-рые модели |
Некото-рые модели |
нет |
|||||||||||||
| Использование в э/магнитном поле |
да |
да |
нет |
нет |
да |
нет |
да |
да |
нет |
да |
|||||||||||||
| Требуется дальнейшая цифровая обработка |
нет |
нет |
нет |
нет |
да |
да |
да |
нет |
нет |
нет |
|||||||||||||
| * Сильно осциллирующие движения |
нет |
Некото-рые модели |
да |
да |
да |
да |
нет |
да |
да |
нет |
|||||||||||||
| Стоимость |
низкая |
низкая |
средняя |
высокая |
Зависит сильно от разре |
средняя |
низкая |
высокая |
средняя |
средняя |
|||||||||||||
* Возможность работы в режиме измерения частых, повторяющихся движений
малой амплитуды.
Потенциометрический датчик - переменный резистор, включенный по схеме потенциометра. Служат для преобразования угловых или линейных механических перемещений в соответствующее изменение сопротивления. С помощью этих датчиков осуществляется контроль за положением задвижек, клапанов и т. д. Основой такого датчика вполне может быть переменный резистор промышленного производства, обычно подключенный к некоторому механическому преобразователю перемещения. Слабое место таких датчиков - наличие подвижного контакта. У проволочных резисторов существует зона нечувствительности, обусловленная дискретным изменением сопротивления при перемещении щетки с витка на виток.
Потенциометр - чаще проволочный (но может быть и угольный) резистор (реостат) с движком, который скользит вдоль резистора. Таким образом, по существу п. является резистором с переменным сопротивлением. Потенциометры бывают линейными и круговыми (в зависимости от характера перемещения его регулирующего органа). Потенциометры часто выполняют роль преобразователей перемещения в электрическую величину - напряжение (для линейных перемещений -линейные потенциометры, для угловых перемещений - круговые). Вообще говоря, потенциометрический преобразователь по определению является параметрическим, т.е. его выходной величиной является сопротивление. Однако простыми средствами с него можно получить и напряжение, пропорциональное перемещению движка, если к концам резистора подвести напряжение питания, а выходное напряжение снимать с движка.
|
|

Переменные резисторы могут иметь различный характер зависимости сопротивления от изменения угла поворота подвижного контакта (рис.2.8.).
Рис. 1.8. Характеристики потенциометрических датчиков
Вид характеристики указывает маркирующая буква на корпусе резистора.
· А - с линейной зависимостью
· Б - с логарифмическим законом изменения сопротивления
· В - c обратной логарифмической зависимостью
Основное достоинство - простота конструкции и дешевизна, легко сопрягаются с электронной схемой. Иногда применяют реохордные датчики, у которых контакт скользит вдоль оси натянутой проволоки, что позволяет получить непрерывную характеристику, без зон нечувствительности. Встречаются конструкции с жидким резистом , менее распространенные из - за явлений электролиза. Надежность контактных систем резко падает, если напряжение, приложенное к контакту меньше определенной величины (зависящей от конструкции контакта).
В проектируемой системе для получения текущего значения высоты платформы используется поплавковый датчик уровня рабочей жидкости в гидробаке. Уровень определяется путем регистрации положения поплавка, плавающего на поверхности рабочей жидкости. Поплавок с помощью тросика связан с отсчетным механизмом, преобразующим вертикальное перемещение поплавка в электрический сигнал.
Перемещение поплавка производится по направляющим тросикам, натянутым между корпусом датчика и якорем на дне емкости. Корпус поплавка изготовлен из нержавеющей стали.
|
|

Потенциометрический датчик модели ПЛЦ 001 (рис 2.9.), разработанный в Научно-исследовательском Институте Физических Исследований (НИИФИ), предназначен для измерения линейных перемещений объектов. Датчик характеризуется высокой надежностью в условиях воздействия вибраций и температур.
Рис. 2.9. Датчик линейных перемещений ПЛЦ 001
Основные технические характеристики датчика приведены в табл. 2.3.
Табл. 2.3. Технические характеристики датчика ППЦ 001
| Диапазон измерений |
мм |
0-500 |
|
| Погрешность |
% |
1,5 |
|
| Выходной сигнал |
начальный |
В |
0 |
| номинальный |
6 |
||
| Напряжение питания |
В |
6± 1 |
|
| Температура окружающей среды |
° С |
-120/+160 |
|
| Вибрационные ускорения |
м/с2 |
300 |
|
| Масса |
кг |
0,3 |
|
|
|

Информацию о текущих углах крена платформы в продольной и поперечной плоскостях вырабатывают датчики угла наклона КЛИН-1 (рис. 2.10.)
Рис. 2.10. Датчик угловых перемещений КЛИН-1
Основные технические характеристики датчика приведены в табл. 2.4.
Табл. 2.4. Технические характеристики датчика КЛИН-1
| Диапазон измерений |
град. |
± 10, ± 30, ± 60, ± 90 |
| Частотный диапазон |
Гц |
0-8 |
| Погрешность |
% |
0,05 |
| Температурная нестабильность коэффициента преобразования |
% / ° С |
0,02 |
| Температурная нестабильность начального уровня |
В/° С |
0,001 |
| Выходное напряжение |
В |
0-5 |
| Напряжение питания |
В |
± (15± 1,5) |
| Ток потребления |
А |
0,05 |
| Температура окружающей среды |
° С |
-50/+60 |
| Вибрационные ускорения |
м/с2 |
350 |
| Масса |
кг |
0,8 |
В проектируемой системе исполнительными устройствами, получающими информацию от микропроцессора, являются электрически управляемые гидрораспределители. Это определяется соображениями лёгкости и точности управления для оператора и, также, возможностью размещения гидрораспределителя в возможно более удобном для этого месте, независимо от месторасположения оператора.
Основными задачами, стоящими перед изготовителями гидрораспределителей являются: обеспечение минимально возможных гидравлических потерь (снижение энергетических затрат, вызывающих повышенный расход топлива, нагрева рабочей жидкости) при минимально возможных габаритах, точность выполнения перемещений основных золотников, обеспечивающих выполнение рабочих движений, оптимальный характер автоматических процессов загрузки гидросистемы в зависимости от нагрузки на рабочие органы.
|
|

Гидросистема с пропорциональным электрическим управлением требует повышенного внимания к чистоте рабочей жидкости (рекомендуемая тонкость фильтрации 10 мкм). В случае обеспечения требований по чистоте рабочей жидкости, гидросистема обеспечивает долговечную и надёжную эксплуатацию.
Рис. 2.11. Характеристики гидрораспределителей
Гидрораспределители подают в специальные гидроцилиндры объем рабочей жидкости, пропорциональный входному напряжению и через них подают жидкость в гидробалансирные группы.
Графики зависимости изменения проходных сечений золотниковых пар от величины хода золотников приведены на рис. 2.11. Анализ формы кривых показывает, что она близка к параболической, т. е. с постоянной «чувствительностью», что подразумевает постоянную величину отношения прироста расхода к самой величине расхода в каждой точке графика при равном значении величины изменения управляющего сигнала. Например, если при изменении управляющего сигнала расход изменяется с 10 л/мин. до 12 л/мин., то при таком же изменении управляющего сигнала в диапазоне расхода, равном, например, 80 л/мин. он изменится до 96 л/мин. (Видно, что относительное изменение расхода постоянно и равно 20%). Такая характеристика зависимости и форма графика называются «прогрессивными».
|
|
Для применения в системе управления в качестве задатчика аналогового сигнала предназначен командоаппарат. Оператор ПКП вводит требуемое значение высоты подъема платформы посредством командоаппарата с потенциометрическим датчиком.
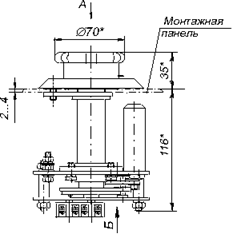
Рис. 2.12. Командоаппарат потенциометрический КПМ11ФУ
Командоаппарат потенциометрический КПМ11ФУ (рис. 2.12), маховичковый с асимметричной шкалой, однооборотный, встроен в панель пульта (утопленный). Маховичок может поворачиваться на угол от 0 до 350 градусов и фиксироваться в любом положении. В командоаппарате установлен потенциометр сопротивлением 2 кОм (рис.2.13.), предельная мощность рассеивания 1Вт, Uпит= 24В постоянного тока, Uвых=0...10В, Iвых=0...12мА. Для соединения с внешними цепями в командоаппарате предусмотрен клемм
|
|

ник.
Рис.2.13. Схема электрическая командоаппарата КПМ11ФУ
На листе 8 изображен общий вид командоаппарата, посредством которого оператор задает требуемую высоту платформы.
Командоаппарат установлен на пульте управления в кабине водителя. Для того, чтобы закрепить командоаппарат на монтажной панели в последней выполняются два отверстия диаметром 7 и 28 мм. Меньшее отверстие предназначено для фиксации командоаппарата относительно монтажной панели. В это отверстие входит стопорный штифт. Толщина монтажной панели может колебаться в диапазоне от 2 д 4 мм.
Над монтажной панелью выступает лишь маховичок командоаппарата и диск с нанесенной на него шкалой, которая проградуирована в сантиметрах поднятия платформы над дорожным полотном. Диск-шкала неподвижен, а стрелка-указатель закреплена на вращающемся относительно диска валу маховичка.
Под монтажной панелью скрыт сам механизм потенциометра и клеммник. Потенциометр заключен в цилиндр. Угловое положение маховичка передается к нему посредством зубчатых колес, закрепленных между двумя неподвижными пластинами. Эти пластины стянуты четырьмя болтами по периметру. К нижней пластине посредством винтового соединения прикреплен клеммник с расположенными на нем клеммами, к которым подводится питающее и снимается выходное напряжение.
Электронный блок управления системой стабилизации ПКП включает в себя:
- Однокристальную микроЭВМ КМ1816ВЕ51;
- БИС программируемого параллельного интерфейса КР580ВВ55;
- БИС аналогово-цифровой системы сбора данных К572ПВ4;
- Аналогово-цифровой преобразователь К1113ПВ1;
- Буферный регистр 588ИР2;
- Микросхемы памяти:
- ОЗУ - КР537РУ8;
- ПЗУ - КР556РТ15;
- Соединительные элементы.
МикроЭВМ КМ1816ВЕ51 является основным элементом электронного блока управления системой автоматической стабилизации. Она имеет в своем составе следующие аппаратурные средства:
- процессор, в состав которого входят однобайтное арифметико-логическое устройство и схемы реализации команд умножения и деления;
- ППЗУ программ емкостью 4 Кбайт;
- ОЗУ данных емкостью 128 байт;
- Два шестнадцатибитных таймера/счетчика;
- Программируемые схемы ввода/вывода (32 линии);
- Блок двухуровневого векторного прерывания от пяти источников и др.
МикроЭВМ выполнена на основе высокоуровневой n-МОП технологии и выпускается в корпусе БИС, имеющем 40 внешних выводов. Для работы микроконтроллеру требуется один источник питания +5 В. Через четыре программируемых порта ввода/вывода микроЭВМ взаимодействует со средой в стандарте ТТЛ с тремя состояниями выхода.
Корпус КМ1816ВЕ51 имеет два вывода для подключения кварцевого резонатора, четыре вывода для сигналов, управляющих режимом работы микроконтроллера и два вывода для подключения питания.
Микроконтроллер может работать в диапазоне частот от 1,2 до 12 МГц, при этом минимальный цикл выполнения команды равен 1 мкс, а быстродействие равно одному миллиону операций простой пересылки в секунду.
МикроЭВМ организует работу всей системы. В соответствии с введенной в него программой, микроконтроллер путем периодического опроса сигналов состояния объекта, сформированных датчиками объекта управления, генерирует выходные сигналы управления исполнительными механизмами.
Учитывая тот факт, что в данной системе будет использована внешняя память данных, линии портов 0 и 2 микропроцессора организуют общую разделяемую память адреса/данных, работающую в режиме временного мультиплексирования. При этом через порт 0 сначала выводится младший байт адреса внешней памяти, а затем выдается или принимается байт данных (мультиплексированная шина). Через порт 2 выводится старший байт адреса в тех случаях, когда разрядность адреса равна 16 бит (как и в данной системе).
Структура микроконтроллера КМ1816ВЕ51 и система его команд таковы, что в случае необходимости его функциональные возможности могут быть расширены. С использованием внешних дополнительных БИС постоянной и оперативной памяти расширяется адресное пространство микроконтроллера, а путем подключения интерфейсной БИС увеличивается также и число линий связи с объектом управления (в случае необходимости - практически без ограничения).
Микроконтроллер КМ1816ВЕ51 через порт 1 осуществляет функции управления электронными блоками гидрораспределителей, выдавая "1" или "0" на соответствующий выход.
Для расширения системы ввода/вывода используется схема параллельного интерфейса КР580ВВ55. Порты схемы адресуются как ячейки внешней памяти данных, то есть схема параллельного интерфейса связана с микроконтроллером шиной адрес/данные порта 0.
Схема КР580ВВ55 имеет четыре двунаправленных порта (один 8 бит - связь с микроконтроллером и три по 8 бит).
Линии схемы запрограммированы следующим образом:
- 5 линий канала А (порт 0) - вывод сигналов управления БИС аналогово-цифровой системы сбора данных К572ПВ4;
- 8 линий канала В (порт 1) - ввод данных с БИС аналогово-цифровой системы сбора данных К572ПВ4;
- 8 линий канала С (порт 2) - ввод данных с аналогово-цифрового преобразователя К1113ПВ1.
Выходные сигналы с аналоговых датчиков положения, в силу их физической природы, требуют промежуточного преобразования перед вводом информации от них в микропроцессор.
Для этой цели в системе используется БИС аналогово-цифровой системы сбора данных К572ПВ4. Микросхема К572ПВ4 аналого-цифровой системы (АЦС) сбора данных предназначена для преобразования аналоговых сигналов, поступающих по восьми параллельным каналам в цифровой код с последующим его сохранением в ОЗУ и считыванием во внешнем МП в режиме прямого доступа к памяти. Микросхема АЦС К572ПВ4 изготовлена по КМОП технологии. В основе ее лежит восьмиразрядный аналогово-цифровой преобразователь последовательного приближения. Кроме того, в состав микросхемы входят: восьмиканальный мультиплексор, ОЗУ на 64 бит с произвольной выборкой, буферные схемы с тремя устойчивыми состояниями, а также схема управления.
Система сбора данных обеспечивает непосредственное сопряжение с МП, имеющими как раздельные, так и общие шины адреса и данных. Управление К572ПВ4 осуществляется от МП логическими сигналами ТТЛ и КМОП уровней. Режим прямого доступа к памяти реализуется в соответствии с алгоритмом последовательной обработки аналоговых сигналов по восьми независимым входам.
Данная схема в составе проектируемой микропроцессорной системы задействует всего три входа из восьми по количеству датчиков положения объекта управления.
Полупроводниковая БИС функционально завершенного АЦП типа К111ЗПВ1 предназначена для применения в электронной аппаратуре в составе блоков аналогового ввода. Микросхема выполняет функцию аналого-цифрового преобразования однополярного или биполярного входного сигнала с представлением результатов преобразования в параллельном двоичном коде. Она содержит все функциональные узлы АЦП ПП. Выходные каскады позволяют считывать результат преобразования непосредственно на шину данных МП. Несколько АЦП могут обслуживать один МП и наоборот. По уровням входных и выходных сигналов АЦП сопрягается с цифровыми ТТЛ ИС.
Между микроЭВМ и подсистемой внешней памяти данных (ОЗУ и ПЗУ) имеется микросхема буферного регистра 588ИР2. Его назначение - запись и хранение кода адреса при работе микроконтроллера с внешней памятью данных. Буферный регистр 588ИР2 относится к регистрам хранения. Совместимый с микропроцессорами, он имеет 12 разрядов с тремя устойчивыми состояниями на выходе.
В подсистеме памяти используются две микросхемы:
Микросхема ОЗУ - КР537РУ8. Данная серия микросхем наиболее развита. Она включает в себя более 20 типономиналов микросхем, отличающихся друг от друга информационной емкостью (от 1024 до 65536 бит), организацией (одноразрядная и словарная), быстродействием (более чем в пять раз), потребляемой мощностью. Общими свойствами микросхем являются: единое напряжение питания 5 В, уровни ТТЛ входных и выходных сигналов, схема выхода с тремя состояниями и др. Таким образом, при необходимости увеличения ОЗУ достаточно взять микросхему большей емкости той же серии.
Микросхема КР537РУ8 имеет емкость 2К х 8 байт и работает в режиме записи, считывания и хранения информации, в зависимости от сигналов управления, приходящих с микроконтроллера.
Микросхема ПЗУ КР556РТ15 также имеет емкость 2К х 8 байт и тип входа - с тремя состояниями ТТЛ.
При необходимости увеличения ПЗУ данная микросхема может быть заменена на микросхему КР556РТ16 емкостью 8К х 8 байт или другую, большей емкости.
Необходимо отметить также и то, что при увеличении ОЗУ и/или ПЗУ потребуется заменить 12-разрядный буферный регистр 588ИР2 (так как 212 = 4096 бит = 4 Кбайт) на регистр с большим количеством разрядов или подключить оставшиеся 4 линии порта 2 микроконтроллера непосредственно к микросхемам памяти. В этом случае объем адресуемого пространства составит 216 = 65536 бит = 65 Кбайт.
Описание работы структурной схемы.
Уровень напряжения с датчиков положения платформы поступает в БИС цифровой системы сбора данных, преобразуется в цифровой код и подается на вход БИС ППИ. Задатчик высоты платформы также вырабатывает аналоговый сигнал и поэтому нуждается в преобразовании перед входом в МПС.
БИС ППИ передает информацию микропроцессору. Микропроцессор сообщается с подсистемой внешней памяти посредством двусторонней шины адреса/данных. Обмен данными производится через буферный регистр.
Микропроцессор вырабатывает код управляющего воздействия и записывает его в регистры, откуда сигнал поступает к электрически управляемым гидрораспределителям.
2.6. Алгоритм функционирования системы
В алгоритме работы системы можно выделить три основные части: выравнивание платформы в поперечной плоскости, выравнивание платформы в продольной плоскости и стабилизация платформы на заданной высоте. Три входных параметра системы, один из которых задаваемый, контролируются обратной связью.
Система управления последовательно опрашивает датчики положения платформы и последовательно отслеживает горизонтальность платформы и дорожный просвет (высоту платформы). Следует отметить, что проектируемая система не способна одновременно выравнивать платформу в двух плоскостях и контролировать ее высоту.
Непосредственно после инициализации системы производится ввод информации о текущем поперечном крене платформы a с соответствующего датчика. Горизонтальность платформы в поперечной плоскости отслеживается следующим образом. Если крен платформы в заданной плоскости отличен от нуля, определяется знак этого отклонения, иначе говоря, на какой борт - на левый или на правый, наблюдается крен. Если угол поперечного крена отрицателен (крен на левый борт), микропроцессор вырабатывает управляющие сигналы на соответствующие блоки гидрораспределителей с целью приподнять левый борт платформы и одновременно на ту же величину опустить ее правый борт, после чего вновь вводится информация о достигнутом поперечном крене. Если горизонтальность платформы в заданной плоскости обеспечить не удалось, система стабилизации снова вырабатывает управляющее воздействие на исполнительные механизмы в зависимости от величины и знака контролируемой на данном этапе величины. И так до тех пор, пока не будет достигнуто горизонтальное положение платформы в поперечной плоскости, о чем будет сигнализировать код нулевого крена опрашиваемого датчика. Получив этот сигнал, система переходит к следующему этапу работы.
На следующем этапе система автоматической стабилизации аналогичным образом осуществляет горизонтирование платформы в продольной плоскости. С датчика продольного крена j вводится информация о текущем продольном крене. Если крен отличен от нуля, определяется знак этого отклонения. Если угол продольного крена отрицателен (крен на нос), микропроцессор вырабатывает управляющие сигналы на соответствующие блоки гидрораспределителей с целью приподнять носовую часть платформы и одновременно на ту же величину опустить корму, после чего вновь вводится информация о достигнутом продольном крене. Если горизонтальность платформы в заданной плоскости обеспечить не удалось, система стабилизации снова вырабатывает управляющее воздействие на исполнительные механизмы в зависимости от величины и знака контролируемой на данном этапе величины. И так до тех пор, пока не будет достигнуто горизонтальное положение платформы в продольной плоскости, о чем будет сигнализировать код нулевого крена опрашиваемого датчика. Получив этот сигнал, система переходит к следующему этапу работы.
На третьем этапе работы контролируется дорожный просвет (высота) платформы. В систему вводится величина требуемой высоты поднятия платформы, которую устанавливает оператор посредством командоаппарата на пульте управления. Затем, следуя сложным, заранее записанным в память зависимостям, микропроцессор вычисляет текущий дорожный просвет, основываясь на информации с датчика уровня жидкости в гидробаке и массе сопутствующих факторов гидравлической природы. Полученное значение текущей высоты платформы сравнивается с заданным. Если они отличны, определяется знак отклонения. Текущая высота меньшая заданной свидетельствует о необходимости поднятия платформы, текущая высота большая заданной - о необходимости опускания платформы. На следующем шаге микропроцессор вырабатывает управляющие сигналы на все блоки гидрораспределителей с целью приподнять платформу или ее опустить, после чего вновь определяется текущая высота платформы и сравнивается с заданной. Если они стали равны, система возвращается к первому этапу своего функционирования для отслеживания горизонтального положения платформы. После чего алгоритм повторяется снова.
3. Экономическая часть.
Разработка системы автоматической стабилизации пневмоколесной платформы является актуальной и эффективной. Актуальность разработки заключается в том, что при современном уровне развития вычислительной техники существует возможность перейти от постоянного ручного контроля положения платформы оператором к автоматическому отслеживанию заданных параметров при помощи микропроцессорной системы управления. Это повлечет за собой радикальное снижение утомляемости оператора и, как следствие, повышение надежности перевозки грузов. Переключение внимания оператора с платформы на дорогу повысит скорость и безопасность перевозки, что позволит за то же время выполнить большее количество рейсов.
Эффективность разработки системы автоматической стабилизации пневмоколесной платформы состоит в том, что она позволяет исключить ошибочные действия оператора, вызванные его утомлением, и повысить скорость восстановления безопасного горизонтального положения платформы при быстро меняющихся внешних условиях. Тем самым резко снижается риск возникновения чрезвычайных ситуаций при транспортировке, что позволяет расширить номенклатуру перевозимых грузов.
Таким образом, электронная система управления платформой позволит повысить технико-экономические показатели ТС для перевозки крупногабаритных и неделимых грузов.
Расчеты экономических показателей выполнены в трех разделах: затраты на этапе разработки, затраты на этапе производства, приведенные к одному году и расчет доходов и затрат на один год производства.
3.1. Затраты на этапе разработки.
Раздел включает в себя определение заработной платы разработчиков, ЕСН, материальных затрат, затрат на содержание оборудования, транспортных расходов, аренды помещения, энергетических затрат, амортизации оборудования и прочих затрат.
3.1.1. Заработная плата разработчиков.
Сз.осн = Т * Счас, где
Сз.осн - основная заработная плата;
Т - количество часов (срок работы);
Счас - средняя часовая ставка.
Таблица 3.1.1. Заработная плата разработчиков.
| № п\п |
Вид работ |
Число работающих, чел |
Количество часов работы, час |
| 1. |
Разработка систем с оформлением технического задания |
4 |
250 |
| 2. |
Разработка конструкторской документации |
3 |
70 |
| 3. |
Изготовление опытных образцов |
2 |
200 |
| 4. |
Испытание и доработка опытных образцов |
2 |
400 |
| 5. |
Разработка технической документации |
2 |
160 |
| ИТОГО: |
13 |
1020 |
|
Принимаю среднюю ставку равной Счас. = 40 руб/час.
Таким образом Сз.осн = 1020 * 40 = 40 800 руб.
Дополнительная заработная плата и премии из фонда заработной платы составляет 35…45% Сз.осн.
Сз.доп = 0,35 * 40 800 = 14 280 руб.
Фонд заработной платы разработчиков равен:
ФЗПраз. = Сз.осн + Сз.доп = 40 800 + 14 280 = 55 080 руб.
3.1.2. ЕСН
ЕСН составляет 39,4% от ФЗПраз. и распределяется по статьям в соответствии с таблицей 3.1.2.
Таблица 3.1.2. ЕСН.
| № п\п |
Отчисления |
% от ФЗП |
Сумма, руб |
| 1. |
В пенсионный фонд |
28 |
15 422 |
| 2. |
На социальное страхование |
4 |
2 974 |
| 3. |
На обязательное медицинское страхование |
3,6 |
2 203 |
| 4. |
На мероприятия по борьбе с травматизмом |
2 |
1 102 |
| ИТОГО: |
37,6 |
21 702 |
|
Табл. 3.1.3. Затраты на приобретение комплектующих и эксплуатационных материалов.
| № п/п |
Комплектующие и эксплуатационные материалы. |
Цена, руб. |
||
| 1. |
Микросхемы |
4 200 |
||
| 2. |
Датчики |
1 500 |
||
| 3. |
Провода, канифоль, припой и пр. |
500 |
||
| 4. |
Электрические элементы |
1 000 |
||
| 5. |
Гидравлическая жидкость |
3 000 |
||
| ИТОГО: |
10 200 loli? У |
|||
3.1.3. Материальные затраты.
К этой статье относятся затраты на приобретение материалов, комплектующих, оборудования, запасных частей (табл. 3.1.3.)
Табл. 3.1.4. Затраты на приобретение и содержание оборудования.
| № п/п |
Наименование оборудования |
Кол-во, шт. |
Цена, руб. |
| 1. |
Компьютеры |
3 |
100 000 Д ОО о'Э О |
| 2. |
Компьютерная периферия и расходные материалы |
65 000 |
|
| 3. |
Стенд испытательный |
1 |
150 000 - <^ О <3 9 "0 |
| 4. |
Паяльник |
4 |
1 600 |
| 5. |
Дрель |
1 |
3 000 |
| 6. |
Комплект электромонтажного инструмента |
2 |
1 200 |
| 7. |
Инвентарь |
1 |
3 200 |
| 8. |
Комплект ключей |
2 |
2 000 |
| ИТОГО: |
326 000 S^C,°=>0 |
||
3.1.4. Затраты на содержание оборудования.
Затраты на содержание оборудования примем в размере 7% от стоимости оборудования:
Зоб = 0,07 * 326 000 = 22 820 руб.
3.1.5. Транспортные расходы.
Транспортные расходы принимаются в размере 8% от стоимости комплектующих и эксплуатационных материалов.
Зтр = 0,08 * 336 200 = 26 896 руб.
3.1.6. Аренда помещения.
Годовая арендная плата за нежилое помещение определяется в соответствии с формулой
Зар = S * Аб * Кз * Ки * Ко,
где S - арендуемая площадь помещений в здании;
Аб - базовая ставка годовой арендной платы за 1 кв. м;
Кз - коэффициент территориальной зоны;
Ки - коэффициент цели использования арендуемых помещений;
Ко - коэффициент типа организации.
Зар = 80 * 320 * 1,6 * 1,5 * 1,25 = 76 800 руб.
3.1.7. Затраты на энергетические ресурсы.
5 Затраты на осветительную электроэнергию рассчитывается по формуле
Сэл = 0,16 * F * Др * Ч * Ц, где
F - площадь помещения;
Др - дни работы в году;
Ч - часы работы в день;
Ц - цена за киловатт.
Сэл = 0,16 * 80 * 255 * 8 * 2,45 = 63 975 руб.
5 Затраты на силовую электроэнергию рассчитываются по формуле
Ссил = Ас * Ц, где
Ас - кол-во кВт/ч;
N - цена за киловатт;
Ас = Nc * Тс * Кс, где
Nc - мощность оборудования;
Тс - кол-во часов работы в год;
Кс - поправочный коэффициент;
Ас = 20 * 400 * 0,45 = 3600 Вт/ч.
Ссил = 3600 * 8 = 28 800 руб.
5 Затраты на отопление рассчитываются по формуле:
Сотоп = 0,1 *Ц* V, где
Ц - цена за киловатт;
V - объем комнаты (при высоте потолков З м объем комнаты составит 240 куб.м).
Сотоп = 0,1 * 171 * 240 = 4104 руб.
5 Затраты на воду:
1. Хозяйственно-питьевые нужды составляют 20 л на человека в день.
2. Затраты воды на уборку помещения.
Суб = (F * У * Х) / 1000, где
F - площадь помещения;
У - норма расхода воды;
X - цена 1 литра воды.
Свод = (13 * 255 * 20 * 7) /1000 + (80 * 1,5 * 7)/1000 = 1 939 руб.
5 Суммарные энергетические затраты составят:
Эн.затр = 92 775 + 4 104 + 1 939 = 98 818 руб.
3.1.8. Амортизация оборудования.
Амортизация оборудования определяется линейным способом по формуле:
А = Стоимость оборудования / срок службы;
А = 326 000 / 7 = 65 200 руб.
3.1.9. Прочие затраты.
К этой статье относятся расходы на приобретение канцелярских товаров, оплата услуг связи, банка и пр.
Прочие затраты составляют около 5% от материальных затрат:
Зпр. = 0,05 * 336 200 = 16 810 руб.
3.1.11. Общие затраты на этапе разработки.
Таблица 3.1.5.
| № п\п |
Статьи затрат |
Сумма, руб. |
| 1. |
Затраты на оплату труда |
55 080 |
| 2. |
ЕСН |
21 702 |
| 3. |
Материальные затраты |
32 600 |
| 4. |
Затраты на содержание оборудования |
22 820 |
| 5. |
Транспортные расходы |
26 896 |
| 6. |
Аренда помещения |
76 800 |
| 7. |
Энергетические затраты: |
28 800 |
| бытовая электроэнергия |
63 975 |
|
| 8. |
Амортизация оборудования |
65 200 |
| 9. |
Прочие затраты |
16 810 |
| ИТОГО: |
71 123 |
|
3.2. Затраты на этапе производства, приведенные к одному году.
В данном разделе производится расчет затрат на оплату труда, ЕСН, материальных затрат, затрат на содержание оборудования, транспортных расходов, аренду помещения, затрат на энергетические ресурсы, амортизационные отчисления и прочие затраты.
3.2.1.Заработная плата.
ФЗПраб = Сз.осн + Сз.доп, где
Сз.осн - основная заработная плата;
Сз.доп — дополнительная заработная плата.
Сз.осн = Т * Счас, где
Т - общая годовая трудоемкость работ, чел-час;
Счас - средняя часовая тарифная ставка.
Число работников:
Npa6 = Т / ФРВгод * Кв, где
ФРВгод - годовой фонд рабочего времени одного рабочего, час.
Хорошо распространенная элементная база проектируемой системы и перспективы внедрения разработки в другие отрасли народного хозяйства позволяют прогнозировать годовой объем производства на уровне 2000 шт/год. Для одной системы трудоемкость составит 2 чел-час, общая трудоемкость составит 4000 чел-час.
Npa6 = 4000 / 1900 * 1 = 2 чел.
Сз.осн = 4000 * 40 = 160 000 руб.
Дополнительная заработная плата и премии из фонда заработной платы составляет 0,35…0,45% Сз.осн.
Сз.доп = 0,35 * 160 000 = 53 200 руб.
Фонд заработной платы разработчиков равен
ФЗПраб. = Сз.осн + Сз.доп = 160 000 + 53 200 = 213 200 руб.
3.2.2. ЕСН
ЕСН составляет 39,4% от ФЗПраз. и распределяется по статьям в соответствие с таблицей 3.2.1.
Таблица 3.2.1. ЕСН.
| № п\п |
Отчисления |
% от ФЗП |
Сумма, руб |
| 1. |
В пенсионный фонд |
28 |
57 456 |
| 2. |
На социальное страхование |
4 |
11 081 |
| 3. |
На обязательное медицинское страхование |
3,6 |
7387 |
| 4. |
На мероприятия по борьбе с травматизмом |
2 |
4104 |
| ИТОГО: |
37,6 |
80 028 |
|
3.2.3. Материальные затраты.
Основную часть данной статьи расходов составят затраты на покупку комплектующих.
В таблице 3.2.2. приведены средние рыночные цены составных узлов системы.
При годовом объеме производства в 2000 штук и стоимости комплектующих на одну систему 7300 руб., материальные затраты на их приобретение составят 14 600 000 руб.
3.2.4. Затраты на содержание оборудования.
Состав оборудования, необходимый для сборки микропроцессорной системы управления, показан в табл. 3.2.3.
Затраты на содержание оборудования примем в размере 7% от стоимости оборудования
Зоб = 0,07 * 700 000 = 49 000 руб.
Таблица 3.2.2. Затраты на покупку комплектующих
| № п\п |
Наименование |
Цена руб/ед. |
Кол-во в системе, шт. |
Цена, руб |
|||
| 1. ЭЛЕКТРОННАЯ ЧАСТЬ СИСТЕМЫ |
|||||||
| 1. |
Микропроцессор |
60 |
1 |
60 |
|||
| 2. |
Микросхема ОЗУ |
35 |
1 |
35 |
|||
| 3. |
Микросхема ПЗУ |
40 |
1 |
700 |
|||
| 4. |
БИС ППИ |
40 |
1 |
40 |
|||
| 5. |
Аналогово-цифровой мультиплексор |
450 |
1 |
450 |
|||
| 6. |
Аналогово-цифровой преобразователь |
375 |
1 |
375 |
|||
| 7. |
Буферный регистр |
500 |
1 |
470 |
|||
| 8. |
Соединительные и прочие элементы |
300 |
300 |
||||
| 2.ДАТЧИКИ |
|||||||
| 9. |
Поперечного крена |
500 |
1 |
500 |
|||
| 10. |
Продольного крена |
500 |
1 |
500 |
|||
| 11. |
Уровня жидкости |
500 |
1 |
500 |
|||
| 12. |
Задатчик высоты |
4000 |
1 |
4000 |
|||
| ИТОГО: |
7300 |
||||||
Табл. 3.2.3. Оборудование для сборки системы
| № п\п |
Наименование |
Стоимость, руб |
| 1. |
Комплект инструментов для сборки электронных компонентов |
5 000 |
| 2. |
Комплект инструментов для монтажа механических элементов |
45 000 |
| 3. |
Испытательный стенд |
650 000 |
| ИТОГО: |
700 000 |
|
3.2.5. Транспортные расходы.
Транспортные расходы принимаются в размере 4% от стоимости комплектующих и эксплуатационных материалов
Зтр = 0,08 * 14 600 000 = 584 000 руб.
3.2.6. Аренда помещения.
Годовая арендная плата за нежилое помещение определяется в соответствии с формулой
Зар = S * Аб * Кз * Ки * Ко,
где S - арендуемая площадь помещений в здании;
Аб - базовая ставка годовой арендной платы за 1 кв. м;
Кз - коэффициент территориальной зоны;
Ки - коэффициент цели использования арендуемых помещений;
Ко - коэффициент типа организации.
Зар = 200 * 250 * 1,6 * 1,5 * 1,25 = 192 000 руб.
3.2.7. Затраты на энергетические ресурсы.
5 Затраты на осветительную электроэнергию рассчитывается по формуле
Сэл = 0,16 * F * Др * Ч * Ц, где
F - площадь помещения;
Др - дни работы в году;
Ч - часы работы в день;
Ц - цена за киловатт.
Сэл = 0,16 * 200 * 255 * 8 * 2,45 = 159 936 руб.
5 Затраты на силовую электроэнергию рассчитываются по формуле
Ссил = Ас * Ц, где
Ас - кол-во кВт/ч;
N - цена за киловатт;
Ас = Nc * Тс * Кс, где
Nc - мощность оборудования;
Тс - кол-во часов работы в год;
Кс - поправочный коэффициент;
Ас = 20 * 400 * 0,45 = 3600 Вт/ч.
Ссил = 3600 * 8 = 28 800 руб.
5 Затраты на отопление рассчитываются по формуле:
Сотоп = 0,1 *Ц* V, где
Ц - цена за киловатт;
V - объем комнаты (при высоте потолков З м объем комнаты составит 600 куб.м).
Сотоп = 0,1 * 171 * 600 = 10 260 руб.
5 Затраты на воду:
1. Хозяйственно-питьевые нужды составляют 20 л на человека в день.
2. Затраты воды на уборку помещения.
Суб = (F * У * Х) / 1000, где
F - площадь помещения;
У - норма расхода воды;
X - цена 1 литра воды.
Свод = (2 * 255 * 20 * 7) /1000 + (200 * 1,5 * 7)/1000 = 1 740 руб.
5 Суммарные энергетические затраты составят:
Эн.затр = 188 736 + 10 260 +1 740 = 200 736 руб.
3.2.8. Амортизационные отчисления.
5 Амортизация оборудования определяется линейным способом по формуле:
А = Стоимость оборудования / срок службы;
А = 700 000 / 7 = 140 000 руб.
5 Лицензия.
Стоимость лицензии составляет 12 минимальных размеров оплаты труда. При условии, что минимальная заработная плата равна 132 руб,
Л =12 * 132 = 1 584 руб.
5 Регистрационный сбор.
Размер регистрационного сбора составляет 100 долларов США или 3012 руб.
Р = 3012 руб.
А = 140 000 + 1584 + 3012 = 144 596 руб.
3.2.9. Прочие затраты.
К этой статье относятся платежи в дорожные фонды, затраты на рекламу, затраты на покупку хозяйственных и канцелярских товаров, оплата услуг связи и др. Прочие затраты составляют 4% от материальных затрат:
Зпр = 0,04 * 14 600 000 = 584 000 руб.
3.2.10. Общие затраты на 1 год производства.
Таблица 3.2.4.
| № п\п |
Статьи затрат |
Сумма, руб |
| 1. |
Затраты на оплату труда |
213 200 |
| 2. |
ЕСН |
80 028 |
| 3. |
Материальные затраты |
14 600 000 |
| 4. |
Затраты на содержание оборудования |
49 000 |
| 5. |
Транспортные расходы |
584 000 |
| 6. |
Аренда помещения |
192 000 |
| 7. |
Затраты на энергетические ресурсы |
200 736 |
| 8. |
Амортизационные отчисления |
140 000 |
| 10. |
Прочие затраты |
584 000 |
| ИТОГО: |
16 634 964 |
|
Определяем себестоимость единицы продукции:
Сед = Сгод / Nгод = 16 634 964 / 2 000 = 9 241 руб.
Определяем цену изделия:
Ц.изд = Сед + Кпр / Nгод + Пн,
где Кпр - затраты на проектирование;
Пн - нормативная прибыль, необходимая для нормальной деятельности предприятия.
Цизд = 9 241 + 71 126 / 2 000 + 356 = 10 000 руб.
3.3. Расчет доходов и затрат на один год производства.
5 Затраты брутто берутся из сметы затрат на 1 год производства.
З.брутто = 16 634 964 руб.
5 НДС в затратах
берется с материальных затрат, затрат на содержание оборудования, транспортных расходов, аренды помещения, затрат на энергетические ресурсы, затрат на малоценные и быстро изнашивающиеся предметы, прочих затрат. НДС в затратах рассчитывается по формуле:
НДС в затр = Sзатр * 16,67% = 16 209 736 * 0,1667 = 2 702 163 руб.
5 Затраты нетто
, чистые затраты, рассчитываются по формуле:
З.нетто = З.брутто - НДС в затр = 16 634 964 - 2 702 163 = 13 932 801 руб.
5 Доходы брутто рассчитывается по формуле:
Д.брутто = Ц * К = 10 000 * 2000 = 20 000 000 руб.
Ц - цена одного изделия, руб.
К - количество изделий, выпущенных за год, шт.
5 НДС в доходах
рассчитывается по формуле:
НДС в доходах = 16,67% * Д.брутто;
НДС в доходах = 0,1667% * 20 000 000 = 3 334 000 руб.
5 Доходы нетто
рассчитывается по формуле:
Д.нетто = Д.брутто - НДС;
Д.нетто = 20 000 000 - 3 334 000 = 16 666 000 руб.
5 НДС
, перечисляемый в бюджет
, рассчитывается по формуле:
НДС в бюджет = НДС в дох. - НДС в затр;
НДС в бюджет = 3 334 000 - 2 702 163 = 631 837 руб.
5 Прибыль балансовая
рассчитывается по формуле:
Приб.бал. = Д.нетто - З.нетто;
Приб.бал.= 16 666 000 - 13 932 801 = 2 733 199 руб.
5 Налог на имущество
берется в размере 2% от стоимости оборудования и лицензии за вычетом амортизации оборудования и лицензии.
Налог на им. = 0,02 * (С.об. + С.лиц. - (А.об. + А.лиц.));
Налог на им. = 0,02 * (921 200 - 184 240) = 14 739 руб.
5 Налог на рекламу
берется в размере 5% от затрат на рекламу. Затраты на рекламу составляют 100 000 руб. отдельной статьей они не указываются, так как включены в статью "прочие затраты".
Налог на рекл. = 0,05 * З.рекл. = 0,05 * 100 000 = 5 000 руб.
5 Налогооблагаемая прибыль
рассчитывается по формуле:
Приб. = Приб.бал - Нал. на им. - Нал. на рекл.;
Приб. = 2 733 199 - 14 739 - 5 000 = 2 713 460 руб.
5 Налог на прибыль
берется в размере 24% с прибыли
Нал. на приб. = 0,24 * Приб. = 0,24 * 2 713 460 = 651 230 руб.
5 Чистая прибыль
составит
Приб.чист. = Приб. - Н.пр. = 2 713 460 - 651 230 = 2 062 230 руб.
5 Рентабельность
проекта (для прибыли на единицу затрат) составит
R = (П.чист / З.брутто) * 100%;
R = 2 062 230 / 16 634 964 = 12,4%.
| Показатели |
Сумма, руб |
| 1. Доходы брутто |
20 000 000 |
| 2. НДС в доходах |
3 334 000 |
| 3. Доходы нетто |
16 666 000 |
| 4. Затраты брутто |
16 634 964 |
| 5. НДС в затратах |
2 702 163 |
| 6. Затраты нетто |
13 932 801 |
| 7. НДС к перечислению в бюджет |
631 837 |
| 8. Балансовая прибыль |
2 733 199 |
| 9. Налог на имущество |
14 739 |
| 10. Налог на рекламу |
5000 |
| 11. Налогооблагаемая прибыль |
2 713 460 |
| 12. Налог на прибыль |
651 230 |
| 13. Чистая прибыль |
2 062 230 |
| 14. Рентабельность, % |
12,4 |
3.4. Расчет чистой реальной ценности проекта.
Ставка дисконтирования R берется в размере 20% с целью расширения деятельности фирмы.
Единовременные затраты - это сумма затрат на разработку системы и стоимости оборудования, которое используется на этапе производства.
Текущие затраты - это затраты нетто, то есть затраты за вычетом НДС, с учетом предполагаемой инфляции (20% во второй год, 17% - в третий).
Результат - это доход нетто, то есть доход за вычетом НДС, с учетом предполагаемой инфляции (20% во второй год, 17% - в третий).
Чистый доход - это разность между доходом нетто и затратами нетто.
Дисконтируемый чистый доход - это чистый доход, умноженный на соответствующий дисконтируемый множитель.
Реальная ценность проекта на конкретный год - это сумма чистых доходов за год плюс сумма чистых доходов за предыдущие годы за вычетом единовременных затрат.
Таблица чистой реальной ценности проекта.
| Годы |
||||
| О год |
1 год |
2 год |
3 год |
|
| Единовременные затраты |
1 410 126 |
--- |
--- |
--- |
| Текущие затраты |
--- |
13 932 801 |
16 719 361 |
19 561 653 |
| Результат |
--- |
16 666 000 |
19 999 200 |
23 399 064 |
| Чистый доход |
--- |
2 733 199 |
3 279 839 |
3 837 412 |
| Дисконтируемый множитель |
1 |
0,833 |
0,694 |
0,578 |
| Дисконтируемый чистый доход |
--- |
2 276 755 |
2 276 208 |
2 218 024 |
| Реальная ценность проекта |
--- |
866 629 |
3 142 837 |
5 360 861 |
3.4.1. Расчет точки безубыточности.
Т без. = З.пост / (Ц.изд - З.пер. на 1 изд.);
где З.пост - это сумма расходов на заработную плату, отчисления во внебюджетные фонды, амортизацию, энергетические расходы.
З.пер - это сумма затрат на покупку комплектующих, транспортные расходы, прочие расходы.
Ц.изд - стоимость изделия, равная 10 000 руб.
Т без. = 625 964 / (10 000 - 7 884) = 296 изд.
|
|

Вывод: После выпуска 296 изделий предприятие начнет работать безубыточно.
Рис 3.3. График безубыточности
Вывод
Анализ внедрения системы автоматической стабилизации показывает, что производство данной системы рентабельно (R = 12,4%), а ее окупаемость наступает на первом же году производства.
Разработка системы автоматической стабилизации пневмоколесной платформы является актуальной и эффективной. Актуальность разработки заключается в том, что при современном уровне развития вычислительной техники существует возможность перейти от постоянного ручного контроля положения платформы оператором к автоматическому отслеживанию заданных параметров при помощи микропроцессорной системы управления.
Эффективность разработки системы автоматической стабилизации пневмоколесной платформы состоит в том, что она позволяет исключить ошибочные действия оператора, вызванные его утомлением, и повысить скорость восстановления безопасного горизонтального положения платформы при быстро меняющихся внешних условиях.
Таким образом, электронная система управления платформой позволит повысить технико-экономические показатели ТС для перевозки крупногабаритных и неделимых грузов.
4. Безопасность жизнедеятельности
Разработка алгоритма функционирования системы автоматической стабилизации при возникновении аварийных ситуаций
4.1. Введение
Цель и содержание БЖД - это обеспечение комфортных условий деятельности человека на всех стадиях его жизненного цикла и нормативно допустимых уровней воздействия отрицательных факторов на человека и природную среду.
Научные задачи БЖД сводятся к теоретическому анализу и разработке методов идентификации опасных и вредных факторов, генерируемых элементами среды обитания.
Практические задачи БЖД обусловлены выбором принципов защиты, разработкой и рациональным использованием средств защиты человека и природной среды от отрицательного влияния техногенных источников и стихийных явления, а также средств, обеспечивающих комфортное состояние среды жизнедеятельности.
Объект изучения БЖД - это комплекс явлений и процессов в системе "человек - среда обитания", отрицательно воздействующих на человека и природную среду.
Предметом изучения БЖД являются объективные закономерности возникновения опасных и вредных факторов в биосфере и техносфере.
В системе БЖД существует аксиома о потенциальной опасности. Это основополагающий постулат БЖД, который гласит: "Потенциальная опасность является универсальным свойством процесса взаимодействия человека со средой обитания на всех этапах его жизненного цикла".
Аксиома о потенциальной опасности предопределяет, что все действия человека и компоненты среды обитания, прежде всего технические средства, кроме многих положительных свойств обладают способностью генерировать опасные и вредные факторы. При этом любое новое позитивное действие или результат неизбежно сопровождаются возникновением новой потенциальной опасности или группы опасностей.
4.2. Конструктивные и эксплуатационные свойства,
обеспечивающие безопасность ТС
|
|
![]()
![]()
|
|
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
|
|
|
|
|
|
|
|
|
|
|
Безопасность транспортного средства включает в себя комплекс конструктивных и эксплуатационных свойств, снижающих вероятность возникновения дорожно-транспортных происшествий, тяжесть их последствий и отрицательное влияние на окружающую среду. Различают активную, пассивную, послеаварийную и экологическую безопасность транспортного средства (рис. 4.1.).
Рис. 4.1. Безопасность транспортных средств
Под активной безопасностью транспортного средства понимаются его свойства, снижающие вероятность возникновения дорожно-транспортного происшествия. Активная безопасность обеспечивается несколькими эксплуатационными свойствами, позволяющими водителю уверенно управлять автомобилем, разгоняться и тормозить с необходимой интенсивностью, совершать маневры, которые требует дорожная обстановка, без значительных затрат физических сил. Основные из этих свойств: тяговые, тормозные, устойчивость, управляемость, проходимость, информативность, обитаемость.
Под пассивной безопасностью транспортного средства понимаются его свойства, снижающие тяжесть последствий дорожно-транспортного происшествия. Различают внешнюю и внутреннюю пассивную безопасность автомобиля.
Основным требованием внешней пассивной безопасности является обеспечение такого конструктивного выполнения наружных поверхностей и элементов автомобиля, при котором вероятность повреждения человека этими элементами в случае дорожно-транспортного происшествия была бы минимальной.
Как известно, значительное количество происшествий связано со столкновениями и наездами на неподвижное препятствие. В связи с этим одним из требований к внешней пассивной безопасности автомобилей является предохранение водителей и пассажиров от ранений, а также самого автомобиля от повреждений с помощью внешних элементов конструкции.
К внутренней пассивной безопасности автомобиля предъявляются два основных требования:
- создание условий, при которых человек мог бы безопасно выдержать значительные перегрузки;
- исключение травмоопасных элементов внутри кузова (кабины).
Водитель и пассажиры при столкновении после мгновенной остановки автомобиля еще продолжают двигаться, сохраняя скорость движения, которую автомобиль имел перед столкновением. Именно в это время происходит большая часть травм в результате удара головой о ветровое стекло, грудью о рулевое колесо и рулевую колонку, коленями о нижнюю кромку щитка приборов.
Под послеаварийной безопасностью транспортного средства понимаются его свойства в случае аварии не препятствовать эвакуации людей, не наносить травм при эвакуации и после нее. Основными мерами послеаварийной безопасности являются противопожарные мероприятия, мероприятия по эвакуации людей, аварийная сигнализация.
Наиболее тяжелым последствием дорожно-транспортного происшествия является возгорание автомобиля. Чаще всего возгорание происходит при тяжелых происшествиях, таких как столкновение автомобилей, наезды на неподвижные препятствия, а также опрокидывание. Несмотря на небольшую вероятность возгорания (0,03… 1,2% от общего количества происшествий), их последствия тяжелейшие. Они вызывают почти полное разрушение автомобиля и при невозможности эвакуации - гибель людей.
Под экологической безопасностью транспортного средства понимается его свойство снижать степень отрицательного влияния на окружающую среду. Экологическая безопасность охватывает все стороны использования автомобиля. Ниже перечислены основные аспекты экологии, связанные с эксплуатацией автомобиля.
Потеря полезной площади земли . Земля, необходимая для движения и стоянки автомобилей, исключается из пользования других отраслей народного хозяйства. Общая протяженность мировой сети автомобильных дорог с твердым покрытием превышает 10 млн км, что означает потерю площади свыше 30 млн га. Расширение улиц и площадей приводит к увеличению территорий городов и удлинению всех коммуникаций.
Загрязнение атмосферы . Основная масса вредных примесей, рассеянных в атмосфере, является результатом эксплуатации автомобилей. Двигатель средней мощности выбрасывает в атмосферу за один день эксплуатации около 10 м3 отработавших газов, в состав которых входят окись углерода, углеводороды, окислы азота и многие другие токсичные вещества.
Использование природных ресурсов . На производство и эксплуатацию автомобилей расходуются миллионы тонн высококачественных материалов, что приводит к истощению их природных запасов. При экспоненциальном росте потребления энергии на душу населения, характерном для промышленно развитых стран, скоро наступит такой момент, когда существующие источники энергии не смогут удовлетворить потребности человека. Значительная доля потребляемой энергии расходуется автомобилями, к.п.д. двигателей которых составляет 0,3… 0,35. Следовательно, 65…70% энергетического потенциала не используется.
Шум и вибрации . Уровень шума, длительно переносимый человеком без вредных последствий, составляет 80…90 дБ. На улицах крупных городов и промышленных центров уровень шума достигает 120…130 дБ. Колебания почвы, вызываемые движением автомобилей, пагубно сказываются на зданиях и сооружениях.
Для защиты человека от пагубного влияния шума транспортных средств применяют различные приемы: совершенствование конструкции автомобилей, шумозащитные сооружения и зеленые насаждения вдоль оживленных городских магистралей, организация такого режима движения, когда уровень шума наименьший.
Уничтожение флоры и фауны . Автомобили, работающие вне дорог, уплотняют верхний слой почвы, разрушая растительный покров. Бензин и масла, пролитые на землю, приводят к гибели растений. Окислы свинца, содержащиеся в отработавших газах автомобилей, заражают деревья и кустарники. Плоды фруктовых деревьев, растущих вблизи дорог с интенсивным движением, нельзя употреблять в пищу. Ядовиты и цветы, растущие на разделительных полосах. Под колесами автомобилей ежегодно погибают тысячи животных, миллионы птиц, бесчисленное множество насекомых.
Радиопомехи . При работе системы зажигания автомобильного двигателя создаются радиопомехи. Для их подавления в системах зажигания предусмотрены специальные устройства. Правила дорожного движения запрещают эксплуатацию транспортного средства с неисправной системой подавления радиопомех.
Проектируемая система автоматической стабилизации предназначена, в частности, для установки на большегрузные транспортные средства, перевозящие крупногабаритные и опасные грузы. Масса, габариты и номенклатура перевозимых грузов очень разнообразны и достигают внушительных величин. В случае возникновения аварийных ситуаций при транспортировке тяжелых и опасных грузов риск нанести существенный ущерб людям, оборудованию и окружающей среде очень велик.
4.3. Постановка задачи
Требуется решить задачу сигнализации возникновения аварийных ситуаций при транспортировке грузов на пневмоколесной платформе.
Необходимо перечислить возможные варианты ситуаций, которые следует считать опасными для людей, груза и оборудования, проанализированы их признаки и методы обнаружения и разработать на основе этих предпосылок алгоритм функционирования системы автоматической стабилизации при возникновении аварийных ситуаций.
4.4. Решение задачи
Рассмотрим типичные ситуации при транспортировке грузов, которые следует считать аварийными.
Смещение центра тяжести груза. Возникает в случае воздействия на плохо закрепленный груз инерционных сил, внушительных ввиду большой массы перевозимого груза. Здесь возможны следующие опасности: разрушение элементов крепления груза, нарушение габаритных параметров транспортного средства и как крайний случай - частичное или полное обособление груза от платформы, сопровождающееся опасным разрушением перевозимого груза.
Крен опасной величины. Может быть отмечен на стадии загрузки пневмоколесной платформы ввиду неправильного расположения груза на платформе. Также подобная ситуация может возникнуть и как следствие смещения центра тяжести груза. Опасности здесь такие же, а риск потерять груз - еще выше.
Следует отметить, что возникновение подобных аварийных ситуаций в движении значительно опаснее, чем при неподвижной платформе. Инерционные силы и моменты, действующие на груз, существенно выше. Предупреждение и отслеживание аварийных ситуаций также сильно зависят от своевременных и корректных действий оператора пневмоколесной платформы.
Разработанную систему автоматической стабилизации необходимо дополнить вспомогательными датчиками, отслеживающими признаки возникновения вышеперечисленных аварийных ситуаций и элементами индикации опасности на пульте управления оператора.
Ключевыми признаками возникновения аварийных ситуаций будем считать следующие:
- Резкое изменение крена платформы в продольной, поперечной или обоих плоскостях одновременно (отслеживается программно на уже имеющейся элементной базе)
- Внезапная неспособность системы автоматической стабилизации выровнять крен платформы (отслеживается программно на уже имеющейся элементной базе)
- Изменение массы груза при движении, что свидетельствует о потери части груза или всего груза по той или иной причине. Для отслеживания данного параметра понадобится дополнить систему датчиком массы перевозимого груза.
Таким образом, будут задействованы уже имеющиеся в системе датчики крена грузовой платформы. Дополнительно в системе будет установлен датчик массы перевозимого груза.
На панели управления оператора в качестве индикации предлагаю продублировать визуальную информацию звуковым предупреждением, иначе говоря, дополнить контрольную лампу зуммером. Это гарантированно привлечет внимание оператора за наименьший промежуток времени. В критической ситуации выигрыш во времени является неоспоримым преимуществом.
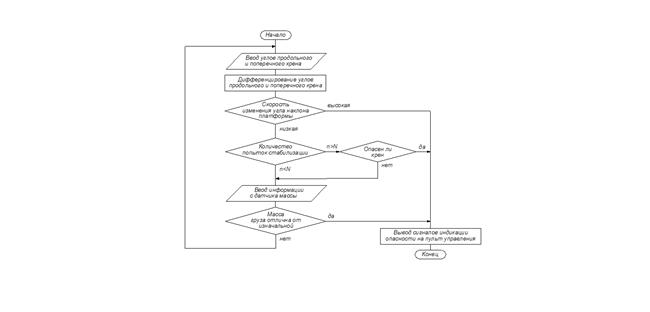 Рис. 4.2. Алгоритм функционирования системы автоматической стабилизации
Рис. 4.2. Алгоритм функционирования системы автоматической стабилизации
при возникновении аварийной ситуации
Разработанный алгоритм функционирования системы представлен на рис. 4.2.
Система работает следующим образом. На основании информации с датчиков продольного и поперечного крена рассчитывается скорость изменения угла наклона платформы, иными словами, сигналы с датчиков дифференцируются. Результат дифференцирования сравнивается с некоторым предельным значением скорости крена, который следует считать критерием опасности. Если вычисленная величина превышает критерий опасности, на пульт управления оператора выводится сигнал об опасности. В противном случае система переходит к следующему этапу своего функционирования.
На следующем этапе контролируется число попыток стабилизации платформы в горизонтальной плоскости. Многократные безуспешные попытки стабилизировать платформу свидетельствуют о возникновении аварийной ситуации. Если количество попыток превышает критерий опасности, система выводит на пульт оператора сигнал об опасности. В противном случае система переходит к следующему этапу своего функционирования.
В систему вводится информация с датчика массы перевозимого груза. При движении платформы неизбежны флуктуации показаний данного датчика, что обязательно должно учитываться при программной обработке сигнала. Если на основании пришедшей с датчика информации можно сделать вывод о том, что масса груза уменьшилась, на пульт управления оператора выводится сигнал об опасности и система прекращает свое функционирование. В противном случае система возвращается к первому этапу свой работы, и алгоритм повторяется снова.
Получив предупредительный сигнал, оператор пневмоколесной платформы должен приостановить движение платформы или осуществляемую операцию и максимально оперативно принять меры по обеспечению безопасности людей, груза и оборудования.
4.5. Вывод
В данном разделе был рассмотрен комплекс общих конструктивных и эксплуатационных свойств транспортных средств, снижающих вероятность возникновения дорожно-транспортных происшествий, тяжесть их последствий и отрицательное влияние на окружающую среду, а также опасности, возникающие при транспортировке крупногабаритных грузов на пневмоколесной платформе.
Перечислены возможные варианты ситуаций, которые следует считать опасными для людей, груза и оборудования, проанализированы их признаки и методы обнаружения. На основе этих предпосылок был успешно разработан алгоритм функционирования системы автоматической стабилизации, обеспечивающий в большинстве случаев гарантированное распознавание опасных ситуаций и своевременное предупреждение оператора.
Таким образом, разработанная система повышает безопасность эксплуатации пневмоколесных платформ для транспортировки крупногабаритных грузов.
5. Использованная литература
1. Аксенов П.В. Многоосные автомобили. - 2-е изд., перераб. и доп. - М.: Машиностроение, 1989. - 280 с.: ил.
2. Аналоговые и цифровые интегральные микросхемы. Справочное пособие/С.В. Якубовский, Н.А. Барканов, Л.И. Ниссельсон и др.; Под ред. С.В. Якубовского. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1985. - 432 с., ил.
3. Вахминцев А.А. Автоматическая стабилизация пневмоколесной платформы для транспортировки крупногабаритных грузов в строительстве. Диссертация на соискание ученой степени кандидата технических наук. Москва, МАДИ, 1990.
4. Виглеб Г. Датчики: Пер. с нем. - М.: Мир, 1989. - 196 с., ил.
5. Горбунов В.Л., Панфилов Д.И., Преснухин Д.Л. Справочное пособие по микропроцессорам и микроЭВМ:/Под ред. Л.Н. Преснухина. - М.: Высш. шк., 1988. - 272 с.: ил.
6. Коноплянко В.И., Рыжков С.В., Воробьев Ю.В. Основы управления автомобилем и безопасность движения. - М.: ДОСААФ, 1989. - 224 с.: ил.
7. Микропроцессорные системы автоматического управления/ В.А. Бесекерский, Н.Б. Ефимов, С.И. Зиатдинов и др.; Под общ. ред. В.А. Бесекерского. - Л.: Машиностроение. Ленингр. отд-ние, 1988. - 365 с.
8. Микропроцессоры и микропроцессорные комплекты интегральных микросхем: Справочник. В 2 т. / В.-Б.Б. Абрайтис, Н.Н. Аверьянов, А.И. Белоус и др.; Под ред. В.А. Шахнова. - М.: Радио и связь, 1988.
9. Микросхемы памяти. ЦАП и АЦП: Справочник - 2-е изд., стереотип / О.Н. Лебедев, А-Й.К. Марцинкявичюс, Э.-А.К. Багданскис и др.; - М.: КубК-а, 1996 - 384 с.: ил.
10. Пахтер И.Х., Цейтлин Г.Д. Современные конструкции автопоездов-тяжеловозов. М., НИИНавтопром, 1974.
11. Петленко Б.И., Рожков В.М., Соколов В.Г. системы сбора, преобразования и передачи информации на автотранспорте. Виды информации и датчики на автомобиле: Учебное пособие/ МАДИ - М., 1989. - 86 с.
12. Пиковская А.Я., Рожков В.М., Соколов В.Г. Автомобильные системы сбора, преобразования и передачи информации. Преобразование сигналов автомобильных датчиков: Учебное пособие/ МАДИ-М., 1990. - 88 с.
13. Прокунцев А.Ф., Юмаев Р.М. Преобразование и обработка информации с датчиков физических величин. - М.: Машиностроение, 1992. - 288 с.: ил.
14. Сташин В.В. и др. Проектирование цифровых устройств на однокристальных микроконтроллерах/ В.В. Сташин, А.В. Урусов, О.Ф. Мологонцева. - М.: Энергоатомиздат, 1990. - 224 с.
15. Титов М.А. и др. Изделия электронной техники. Микропроцессоры и однокристальные микроЭВМ: Справочник / М.А. Титов, А.Ю. Веревкин, В.И. Валерьянов; Под ред. А.И. Ладика и А.И. Сташкевича. - М.: Радио и связь, 1994. - 120 с.: ил.
16. Щелкунов Н.Н., Дианов А.П. Микропроцессорные средства и системы. - М.: Радио и связь, 1989. - 288 с.: ил.
17. Электронные промышленные устройства: Учеб. для студ. вузов спец. "Пром. электрон."/ В.И. Васильев, Ю.М. Гусев, В.Н. Миронов и др. - М.: Высш. шк., 1988. - 303 с.: ил.
При разработке проекта также были использованы следующие ресурсы всемирной компьютерной сети Интернет:
1. http://avs.endtown.ac.ru/avs/doc/mps/index.html - Кафедра автоматизированных и вычислительных систем Воронежского государственного технического университета
2. http://dimasen.narod.ru - электрооборудование и датчики на автомобилях
3. http://dinistor.webzone.ru - научно-производственная и конструкторская фирма ООО НПКФ "Динистор", изготовитель командоаппаратов
4. http://elga5.narod.ru/index.html - сайт разработчика и изготовителя гидравлических компонентов
5. http://nauka.relis.ru/06/0109/06109066.ht m - Как перевозят тяжелые грузы. Журнал "Наука и жизнь"
6. http://old.siemens.ru - датчики производства фирмы Сименс
7. http://www.apz.nnov.ru/ al_gr.htm - Арзамасский приборостроительный завод
8. http://www.autoelectric.ru - Устройства и программы для диагностики автомобильного оборудования
9. http://www.chipnews.ru - интернет-версия популярного журнала для специалистов по электронным компонентам
10. http://www.dvgups.ru/METDOC/GDTRAN/DEPEN/ELSN_TR/O_MIK_TEX/METOD/KDP/MP_KD3.htm - Кафедра микропроцессорных и управляющих систем Дальневосточного государственного университета путей сообщения
11. http://www.gpfk.ru/info_techlib.htm - техническая библиотека Горнопромышленной финансовой компании (ГПФК)
12. http://www.insynet.ru/Equipment/STS/STS_Catalog_2.html - технологические счётные датчики производства STS Electronics
13. http://www.mte.gov.ru/ntp/newoborud/newoborud.htm - Министерство энергетики Российской Федерации. Научно-технический прогресс. Новое оборудование.
14. http://www.nnov.rfnet.ru/rf - Автомобильная электроника
15. http://www.rlocman.com.ru/index.htm - информационный портал по электронике
16. http://www.rusttc.ru/niifi/rus - Научно-исследовательский институт физических измерений
17. http://www.sector-t.ru/info/compl/products/kipis/datch - каталог датчиков угловых и линейных перемещений
18. http://www.technopolus.ru/products.html - системы автоматики и промышленное оборудование
19. http://www.voskhod.nnov.ru/sgr.htm - секционные гидрораспределители Павловского машиностроительного завода "Восход"
20. http://www.zeim.ru/catalog/catalog.shtml - Завод электроники и механики (ЗЭИМ)
6. Приложение
Параметры проектируемой пневмоколесной платформы
1. Количество опор 12
2. Количество рядов 2
3. Межосевое расстояние, м 2,2
4. База платформы, м 2,5
5. Состав гидробалансиров:
I {0, 2, 4, 6}
II {1, 3, 5, 7}
III {8, 9, 10, 11}
6. Коэффициент передачи рычага подвески 1,88
7. Ход подвески, м 0,6
8. Снаряженная масса ПКП, т 144
9. Полная масса ПКП, т 39
10. Масса опоры, т 1
11. Моменты инерции снаряженной ПКП, кгм2
:
Ij 5,3 х 106
Ia 206,25 x 103
12. Жесткость шины, Н/м 1,2 х 106
13. Количество шин на опоре 2
14. Коэффициент демпфирования шины, кг/с 30 х 103
15. Площадь гидроцилиндра опоры, м2 0,023
16. Модуль объемной упругости масла АМГ-10, Па 1,305 х 109
17. Плотность масла АМГ-10, кг/м3 850
18. Объем гидролиний ПКП, л 16
19. Расположение груза на платформе, м:
g1
1,25
g2
5,5
g3
4
20. Скорость движения платформы, км/ч 5
Похожие рефераты:
Оборудование летательных аппаратов
Место и роль промышленного транспорта в транспортной системе
Организация перевозок и управление на транспорте
Модернизация подвески автомобиля ЗАЗ1102 Таврия
Разработка программы совершенствования организации международных перевозок
Кинематика и динамика поступательного движения
Технологический процесс балансировки
Транспортное обслуживание туристов
Мероприятия по совершенствованию технической базы школы подготовки водителей
Пути совершенствования организации транспортных перевозок
Универсальная система управления маслонапорной установкой гидроэлектростанции
Разработка системы автоматического контроля технологических параметров газоперекачивающего агрегата
Организация технологического процесса и взаимосвязь с устройством и планировкой оптового склада
Разработка АСУ процессом производства конической шестерни среднего и заднего моста 6520-2402017
Некоторые особенности расследования преступлений связанных с дорожно-транспортными происшествиями
Исследование особенностей технической эксплуатации ходовой части автомобилей "Toyota"